基于無線通信的嵌入式機器人控制系統設計

3 實時操作系統μC/OS—II的移植
本文引用地址:http://www.104case.com/article/271633.htmμC/OS—II是一個嵌入式實時操作系統內核,包含了任務調度、任務管理、時間管理、內存管理和任務間的通信與同步等基本功能。μC/OS—II進行任務調度時,會把當前任務的CPU寄存器存放到該任務堆棧中,然后再從另一個任務堆棧中恢復原來的工作寄存器,繼續運行另一個任務。
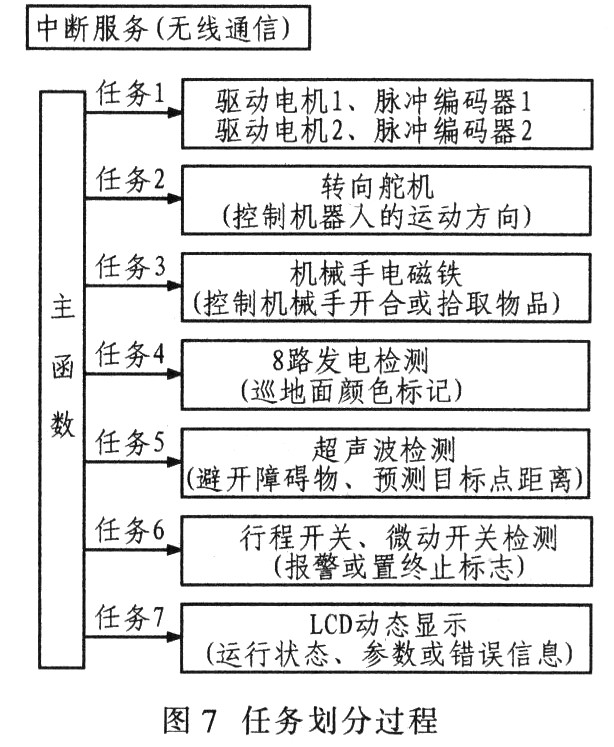
根據各個控制功能和微控制器的資源結構對任務進行劃分,共劃分為7個應用任務,其劃分過程如圖7所示。無線串行通信采用中斷接收方式,保證數據接收的實時性。
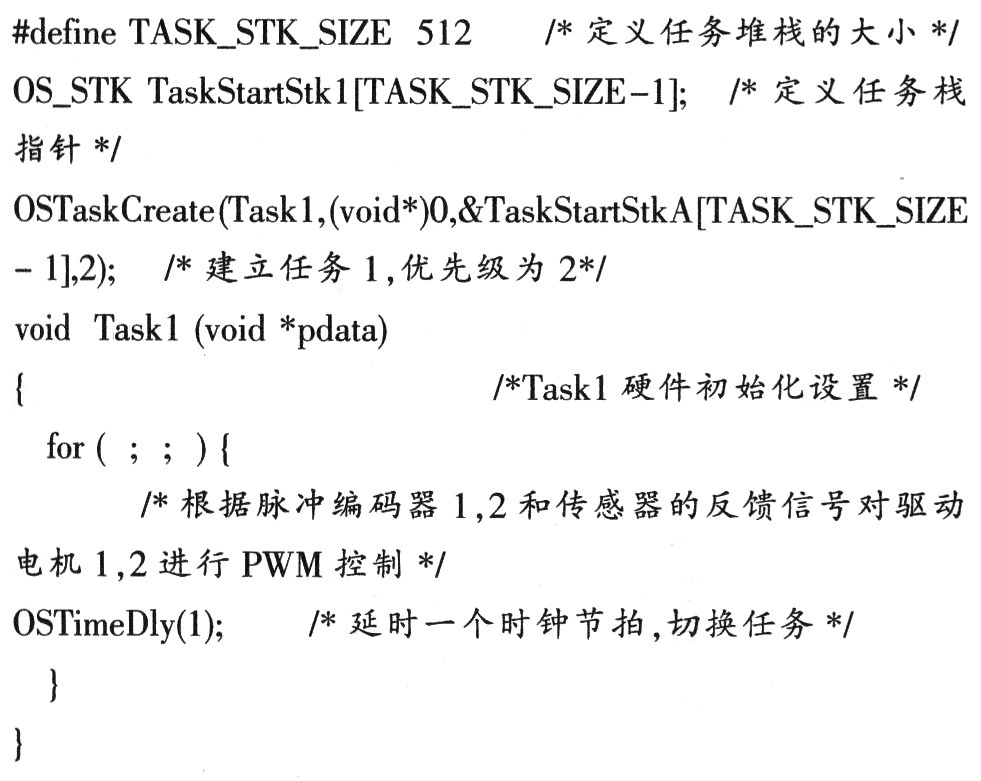
μC/OS一Ⅱ任務的建立包括定義任務堆棧、設定任務優先級、初始化該任務要求的系統硬件及實現具體的控制過程等4部分。現以任務1為例,介紹應用任務的建立過程。
在嵌入式實時操作系統環境下開發實時應用程序,可使程序的設計和擴展變得容易,而且無需大的改動即可增加新的功能。通過將應用程序分割成若干獨立的任務模塊,可大大簡化應用程序的設計過程;而且能快速、可靠地對實時性要求苛刻的事件。通過有效的系統服務、嵌入式實時操作系統,能使系統資源得到更好的利用。
4 調試運行
在機器人控制系統起動時,μC/OS一Ⅱ對堆棧空間、各個控制寄存器和外設器件的硬件進行初始化,并設定當前各個功能部件的初始狀態。
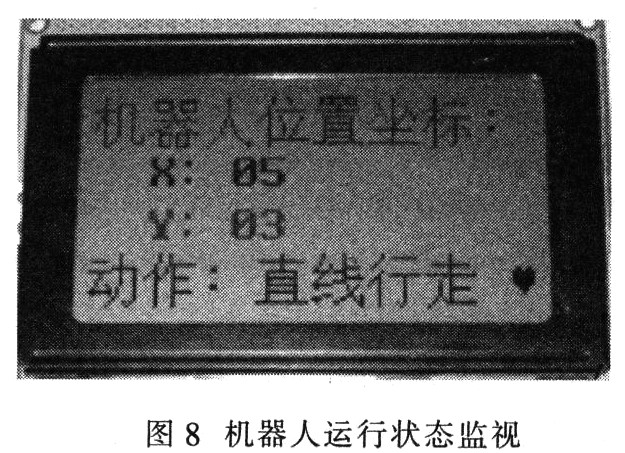
在實時機器人系統下,機器人正常啟動后,系統實時監視機器人在比賽場上的運行狀況,若出現某一動作或功能無效則給出出錯信息。正常運行時實時顯示機器人在比賽場上的坐標值和動作狀態,如圖8所示。
5 結語
根據智能機器人的控制要求,設計了基于無線通信的嵌入式機器人控制系統。在軟件設計上移植了嵌人式實時操作系統μC/OS一Ⅱ。利用光電檢測模塊和超聲波導航模塊感知外部信息,實現了對智能機器人的控制。

pa相關文章:pa是什么
通信相關文章:通信原理









評論