基于CAN總線的多伺服電機同步控制

綜合考慮,本文的時鐘同步方案采用的是硬件時鐘同步,各節點根據系統中指定的主時鐘來調整它們的時鐘,具體實現方法是:添加硬件時鐘同步信號線CONCLK用來傳輸時間同步信號,同步控制信號周期為2 ms,以同步信號的上升沿作為同步點。在控制器中設置同步信號發生器,并在各個驅動器內部設置同步接受單元。驅動器從站的同步接受單元檢測到主戰的CONCLK上升沿后,各從站時鐘同時清零。這樣定期清零不僅保持了各從站時鐘的一致性,同時也避免了同步誤差的累計。為了提高模塊同步信號的抗干擾能力,采用平衡差分驅動方式傳輸同步信號。使用光耦隔離,可以使主站和從站的信號互不干擾。主、從站同步信號電路如圖3.
本文引用地址:http://www.104case.com/article/267223.htm
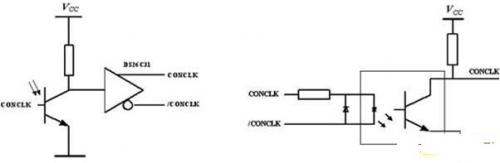
圖3主站、從站同步信號電路圖
5上位機同步運動數據的產生
同步運動數據的產生任務放在到北京首科凱奇電氣技術有限公司開發的軟PLC-ComacPLC系統中。該公司的軟PLC系統,硬件系統采用的是工業計算機平臺,操作系統采用的是微軟推出的WinCE嵌入式操作系統。在此軟PLC系統中,建立了快邏輯任務和慢邏輯任務,快邏輯用于對時間要求高的場合,如緊急情況處理,高精度采樣等情況,慢邏輯任務主要用于一般對時間要求不高的場合。快邏輯任務是一個需要定時執行的任務(類似于中斷服務程序),該任務必須在一個系統采樣周期內執行完成,慢邏輯任務是一個無限循環,它可以在幾個系統采樣周期內完成。快邏輯任務通過定時控制器8254來完成定時,定時周期為1毫秒。在執行過程中每一次采樣周期都執行一次快邏輯任務,產生成同步運動數據。為了保持各個從動軸相對于主軸的同步關系,建立運動參考數據源來虛擬主軸運動狀態。在每個系統采樣周期中,根據虛擬主軸的運動狀態,以及各個從動軸的同步運動要求,分別計算各個從動軸的位置信息,產生各個從動軸的同步運動數據,放入CAN控制器的發送隊列等待發送,如圖4.把運動數據產生和運算任務放在快邏輯任務中,保證產生運動數據的實時性。
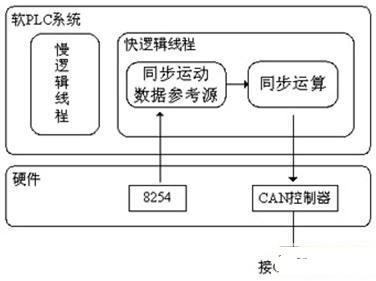
圖4同步運動數據的產生
6同步接口技術協議
本系統總線波特率設為1 Mbps,位傳輸時間τbit為1×10-6秒。每個數據幀由8個字節組成,發送報文數據幀長度固定為131位(29位標識符),反饋報文長度為99位。數據幀傳送時間Cm=131μs.把同步控制信號線CONCLK,作為同步周期信號線和報文的基準信號線。同步控制信號周期為2 ms,高電平有效,信號電平寬度為10.正常通訊時,一個控制周期內CAN網絡可以傳送16個同步數據報文。控制器在CONCLK上跳沿之后50μs內發出指令報文,驅動器在接受到指令報文后100微秒內發出反饋報文。指令報文內容包括位置指令值、邏輯接口信號輸入,其中位置指令占用4個字節(32位),邏輯接口信號輸入占用一個字節。邏輯接口信號輸入包括驅動器使能、復位等指令。在反饋報文中,包括伺服運行狀態信息和故障信息,通信時序如圖5.

圖5通訊時序圖
7結束語
本文針對傳統的機械長軸印刷機同步控制系統,提出了以控制器為核心的現場總線控制系統,以CAN現場總線實現在控制器和伺服之間的通信。此方案不僅克服了傳統機械長軸控制方案的各種機械元件帶來的缺點,而且還具有同步性能好、各伺服單元不互相干擾、控制精度高、維護方便等優點。
這種方法實現同步的特點在于利用了CAN總線可靠性高、傳輸時間短、抗干擾能力強,和數字伺服的位置精度高、全閉環的優點。

伺服電機相關文章:伺服電機工作原理










評論