基于DSP的無刷直流電機伺服系統設計

2.3 位置環控制
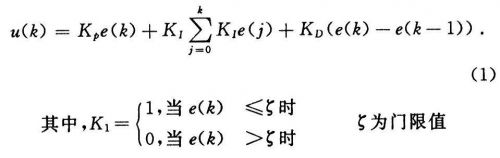
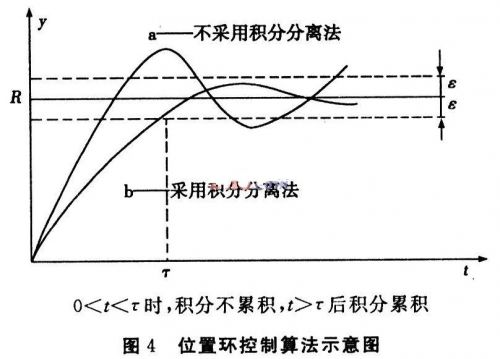
本文引用地址:http://www.104case.com/article/267220.htm位置環是通過安裝在電機轉軸上的電位器實現閉環的控制環路,位置環路的控制對象是電流環和傳動機構。由電位器測得的電壓信號經過信號解調和AD轉換得到位置反饋信號。由于位置環具有很大的不確定性,加之被控對象的非線性以及系統參數的時變性等,為了減小電機在運行過程中積分校正對系統動態性能的影響,本系統對位置環采用積分分離的PID算法。如圖4所示,積分分離法是在誤差量較大時,不進行積分,直至誤差達到一定值之后,才在控制量的計算中加入積分累積。算法為:
3 系統軟件實現
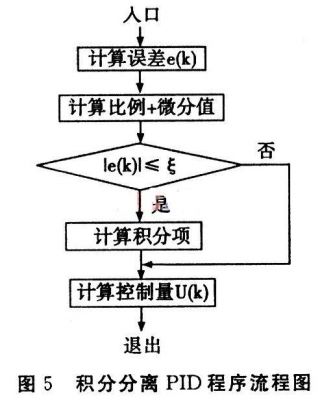
伺服控制系統的軟件采用模塊化設計,使軟件組織靈活有序,便于調整、修改和移植。DSP程序主要由主程序,信號采集與輸出程序,PID算法程序,串口通信程序,濾波程序等組成。主程序首先是DSP的初始化,包括設置系統時鐘、定時器、系統狀態寄存器、設置IO端口。然后初始化中斷設置,確定系統所需要用到的中斷類別及中斷子程序,再設置事件管理器,產生PWM波。圖5為積分分離的PID程序流程圖,用積分分離的改進算法效果較好,程序簡單。
4 結束語
本文設計了一種基于TMS320F2812DSP的無刷直流電機伺服控制系統,采用積分分離的PID控制算法,根據偏差,對不同情況進行不同的PID控制,并對系統的硬件設計以及控制算法進行了研究。試驗結果表明,系統響應快,性能穩定,能較好的滿足伺服系統的控制性能要求。

霍爾傳感器相關文章:霍爾傳感器工作原理
伺服電機相關文章:伺服電機工作原理
霍爾傳感器相關文章:霍爾傳感器原理





評論