基于DSP的無刷直流電機伺服系統設計

1.3 驅動電路
本文引用地址:http://www.104case.com/article/267220.htm電機的驅動電路由驅動芯片IR2130和三相全逆變電路構成。功率驅動電路采用+15 V供電,驅動芯片IR2130內置了2.5 μs的死區時間,防止統一橋臂的上下兩個MOSFET同時導通。當系統出現欠壓,過流時,IR2130啟動內置的保護電路鎖住后面的PWM輸出,保護系統電路。IR2-130的輸入信號是由CPLD解算而得的6路PWM波,經過光耦隔離后送入IR2130,輸出信號送MOSFET驅動無刷直流電機。在三相逆變電路中,六個功率器件起繞組開關作用,采用兩兩通電,三相六狀態方式,每一個瞬間有兩個功率管導通,每隔1/6周期(60°電角度)換相一次,每次換相一個功率管,每個功率管一次導通120°電角度。
2 伺服系統的控制策略
本系統是通過電流、速度、位置三閉環結構實現系統控制的,其中電流環和速度環是內環,位置環是外環。
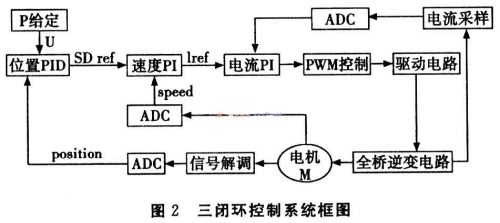
圖2是無刷直流電機控制系統框圖,在系統中設置了速度PI調節器和電流PI調節器,分別調節電機的轉速和電流,兩者之間是串級連接。給定的位置信號U與反饋的位置信號position經過位置PID調節后得到速度的參考值SDref。根據兩次捕獲的時間可以計算出電機運行的速度speed,此速度作為速度參考值的反饋量,經過速度PI調節后可以得到參考電流Iref,通過電流檢測電路可以得到電流的反饋量I,再經過電流PI調節,最后得到的調節量用來控制PWM的占空比,即把速度調節器的輸出當做電流調節器的輸入,再以電流調節器的輸出去控制PWM裝置。
2.1 電流環控制
電流環是通過電流反饋控制使電機電樞電流線性受控,可達到電機輸出力矩的線性控制,并使其動態范圍響應快,安全性提高。
在實際應用中,為加快系統響應速度,減輕DSP負擔,采用模擬實現方法。將電阻串聯在電樞回路上,同時起到一個功率變換電路的過電流保護作用。通過電流反饋控制使電機電樞電流線性受控,可達到電機輸出力矩的線性控制,并使其動態范圍響應快,安全性提高。
電流環設計中,電流調節器選用PI調節器;限幅器可以和電流調節器做在一起,限幅值由PWM功放輸入范圍確定;PWM功放選用專用集成電路;濾波保護網絡采用LC網絡提高EMC水平,二極管網絡保護PWM功放選;電流調節器選用PI調節器;采樣電阻選用O.1Ω,如果所選PWM功放具有電流測量端子,也可以直接讀出電機電流值。
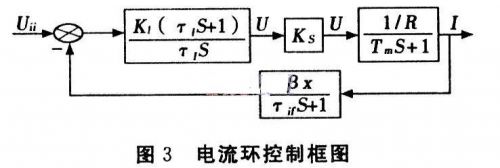
圖3為電流環控制框圖,R-電機電樞電阻,Tm-電機時常數。Ks-功率放大器電壓放大系數。電流環設計的參數:PI調節器,一階無靜差;輸出最大電流≥0.63 A,反饋系數為15.873;帶寬≥30 Hz;τi選為電機等效時常數。
2.2 速度環控制
速度環是位置環的重要內環路,速度閉環可改善控制對象的線性度,提高速度控制精度,改善電網電壓等對電機轉速的影響,提高抗干擾能力,改善系統性能。
轉子旋轉一周的時間內,霍爾傳感器輸出3路180°的交疊信號,電動機每轉動60°就有一次換相,只要檢測兩次換相的時間間隔就能計算出電機的速度。

霍爾傳感器相關文章:霍爾傳感器工作原理
伺服電機相關文章:伺服電機工作原理
霍爾傳感器相關文章:霍爾傳感器原理






評論