MEMS時鐘振蕩器在射頻系統中的應用

然而,增加鎖相環VCXO牽引范圍通常會增加振 蕩器輸出的相位噪聲,這是設計人員不愿意增加牽引范圍的一個原因。DCXO可以解決這個問題。DCXO可以接收數字化的頻率牽引信號,并直接驅動DCXO 內部全數字化的鎖相環反饋分頻器及調制器,不需要經過模數轉換器,從而清除了近載波相位噪聲的一個來源。
本文引用地址:http://www.104case.com/article/266754.htmDCXO可以做到在增加頻率牽引范圍而不增加近載波相位噪聲,并具有優于1%非常線性的增益響應,這可與最好的VCXO相媲美。DCXO提供許多可編程參數,因此,設計人員可以有更多Kv、輸出頻率、牽引范圍參數的選擇。
DCXO參數的選擇
DCXO在實際運行環境下可用的絕對頻率牽引范圍(APR)是由振蕩器電路的牽引范 圍,頻率穩定性和長期老化特性所決定的。例如,一個±150ppm牽引范圍,頻率穩定性±10ppm和老化特性 ±5ppm的DCXO將有±135ppm的APR。如果振蕩器的頻率穩定性等級降到±50ppm, 則可用頻率范圍APR也減少到±95ppm。在滿足系統規格前提下,設計人員可能需要考慮在所需振蕩器穩定性和器件成本之間的權衡。
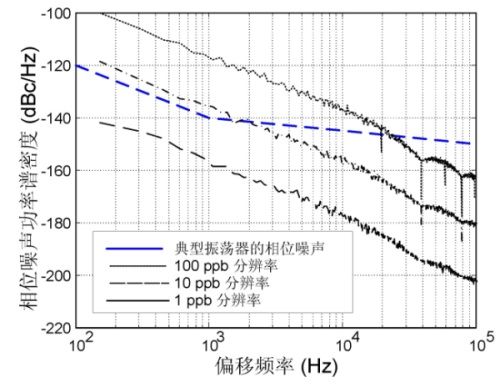
圖2:頻率分辨率量化引起的相位噪聲,DCXO 10 MHz輸出,頻率更新速率每秒25000次
應用DCXO的數字鎖相環路設計需要選擇合適的頻率分辨率、頻率更新速率和更新延遲,以盡量減少頻率更新引起的量化相位噪聲。通過提高頻率更新速率和頻率分 辨率,量化噪聲可以降至振蕩器本征相位噪聲水平以下。圖2是不同頻率分辨率調整下的10MHz DCXO相位噪聲, 頻率更新速率每秒25,000次。圖中數據顯示,如果DCXO頻率調整的分辨率高于10ppb,頻率更新引入的量化噪聲可降至低于振蕩器本征相位噪聲的水 平,使得頻率調整不會影響性能。頻率更新速率也是非常重要的設計參數,因為更新速率太低會導致DCXO在相對長的時間累積較大的頻率相位誤差,從而導致較 大的頻率調整數值和增加量化相位噪聲。但是,對于一個能以1ppb分辨率調整的DCXO,即使是低至每秒2,500次的更新速率,也足以確保量化噪聲不影響振蕩器的性能(見圖3)。
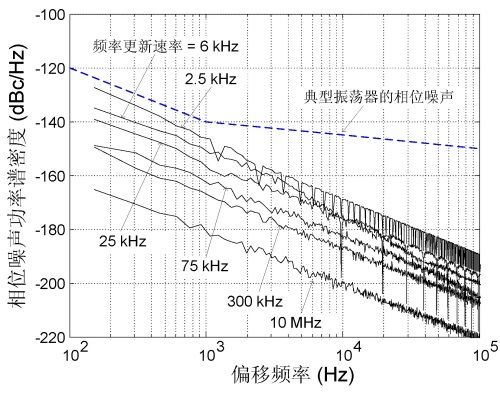
圖3:頻率更新速率對近載波相位噪聲的影響,DCXO頻率分辨率1 ppb

模數轉換器相關文章:模數轉換器工作原理
鎖相環相關文章:鎖相環原理 網線測試儀相關文章:網線測試儀原理 全息投影相關文章:全息投影原理






評論