節能型循環泵控制器

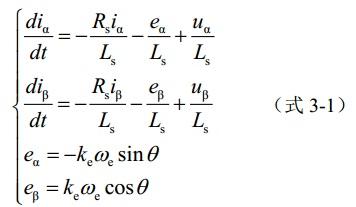
3.2 滑模觀測器算法分析
本文引用地址:http://www.104case.com/article/265861.htm滑模觀測器即是基于上述αβ 定子靜止坐標系的數學方程實現的,整個滑模觀測器位置估計方法的框圖如圖 3-1 下:
由圖 3-1 所示,滑模觀測器算法的輸入量為:
Rs——定子電阻
Ls——相電感
Ts——控制周期
算法輸出量為:
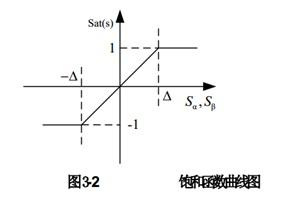
滑模觀測器的本質是通過結構變換開關,以很高的頻率在滑模面上來回切換,是狀態點以很小的幅度在相平面上運動,最終運動到穩定點,從而使得估計值逼近真實值。傳統的常值切換滑模控制應用于反電動勢觀測器時,由于開關時間和空間上的滯后,使得滑模觀測器呈現固有的抖動現象。因此使用飽和函數代替開關函數作為切換函數,通過選擇合理的邊界層厚度削弱抖動。
基于飽和函數的離散滑模觀測器為:
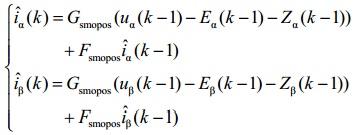
式中

為代替滑模變結構開關函數的飽和函數,函數曲線如圖 3-2 所示。圖中,? 為邊界層。
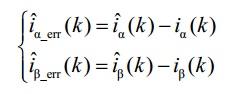
估計電流的誤差方程為:
通過滑模變結構進行估計的結果如下:
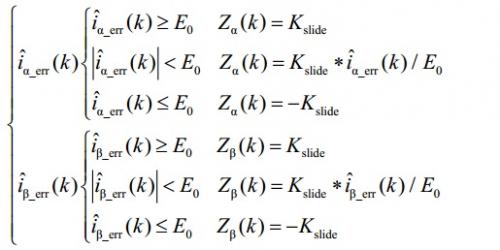
式中,
將滑模估計的結果為開關信號,其中含有反電動勢估計值的信息,經過低通濾波器得到估計的反電動勢為:
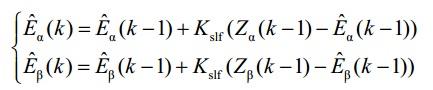
其中
從而求得轉子位置為:

對位置微分即可求得轉速:
轉速信號中包含了滑模所帶來的抖動,因此需要對轉速進行濾波:
3.3 算法實現
滑模位置估計方法是基于反電動勢估計的,電機在零速和低速時反電動勢很小,這極大的影響了滑模觀測器的性能,甚至是不能工作。因此需要設計另外的算法確保電機啟動。最為簡單的啟動算法是使用壓頻比(V/F)控制方式啟動電機。
為了降低從壓頻比方式過渡到滑模估計控制方式的電流波動,壓頻比控制時電流環仍然工作,因此壓頻比控制的工作原理為:給定電流命令值
當給定電流命令值
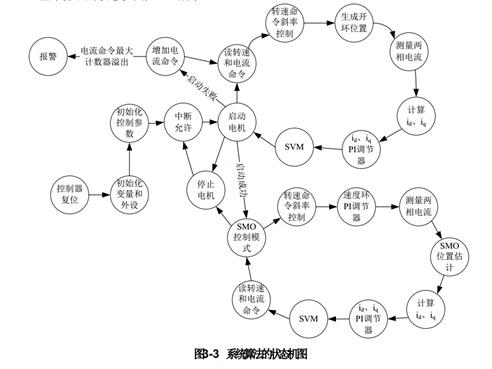
整個算法的狀態機圖如 3-3 所示:
4、實驗結果及分析
電機最小工作轉速為 1000rpm,因此電機起動后立刻加速至 1000rpm,穩定后電流波形如下圖 4-1 左所示。水泵的最小工作轉速為 1200rpm,此轉速下的穩態波形如圖 4-1 右所示。由兩張波形可以看出,在最小工作點電機穩定運行。
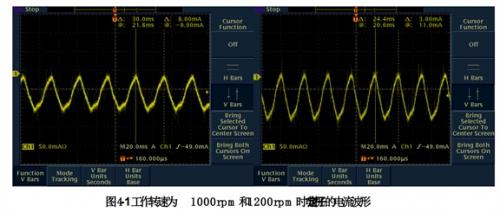
圖 4-2 左是電機工作在 2000rpm 時的穩態電流波形,圖 4-2 右是電機工作在 3000rpm 時的穩態電流波形。由兩張電流波形可以看出,此時電流波形正弦度較高。

表 4-1 列出了在不同轉速下的功率和效率數據。數據存在一定的測量誤差,但是即使如此,從數據依然可以看出,該水泵系統的高效工作點在 1500rpm 以上。
表4-1 不同轉速下的功率和效率數據















評論