基于svpwm變頻調速的雙電機控制算法應用

4.系統仿真結果分析
本文引用地址:http://www.104case.com/article/264458.htm系統中電機選用交流永磁同步電機(PMSM),通過simulink對本文中的模型進行仿真實驗。
在系統matlab7.1中,使用的電機模型的主要參數為:定子電阻Rs=0.0918Ω,交直軸定子電感Ld=Lq=0.000975H,轉子磁場磁通λ=0.1688Wb,轉動慣量J=0.003945kg·㎡,粘滯摩擦系數B=0.0004924N·m·s,極對數P=4.
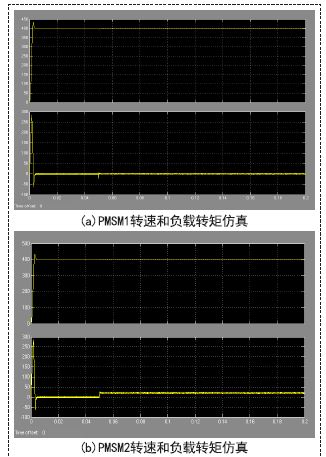
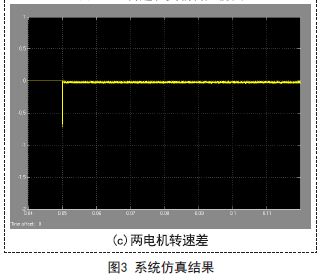
將電機轉速設定為400r/min,讓電機進行零負載啟動。設定仿真時間為0.2s,為了驗證負載改變對系統產生的影響和雙電機的跟隨性能,在t=0.05s時,給PMSM2突加一個TM=20N·m的負載轉矩。仿真圖形如圖3所示。
由圖3可以看出電機在啟動后很快達到穩定狀態,轉子的轉速穩定到400r/min.當電機PMSM2突加負載轉矩后,PMSM2轉速經過短暫的下降后快速達到穩定,轉矩恒定在20N·m.
PMSM1轉速受到PMSM2負載改變的影響,出現微小的下降,然后快速恢復穩定,轉矩也出現微小的波動后迅速恢復穩定。說明基于svpwm調速的PID雙閉環控制系統有較強的魯棒性,雙電機間偏差耦合補償策略當某一電機負載改變時,另一個電機有良好的跟隨性能。
?
?
5.結束語
系統在采用偏差耦合控制策略的基礎上加入PID控制補償器,使系統能夠很好的實現同步控制。每臺電機都采用專門的控制器和速度補償模塊,通過svpwm方式對電機進行調速,并采用電流環與速度環的雙閉環控制,即每臺電機及其控制器組成一個閉環系統,各子系統之間通過速度補償模塊進行耦合,形成完整的控制系統,增強了系統的抗干擾性。仿真結果表明,基于svpwm的PID雙閉環系統具有超調量小、響應迅速、魯棒性強等特點,而加入偏差耦合控制策略的雙電機控制系統具有良好的同步性。

pid控制器相關文章:pid控制器原理
脈寬調制相關文章:脈寬調制原理






評論