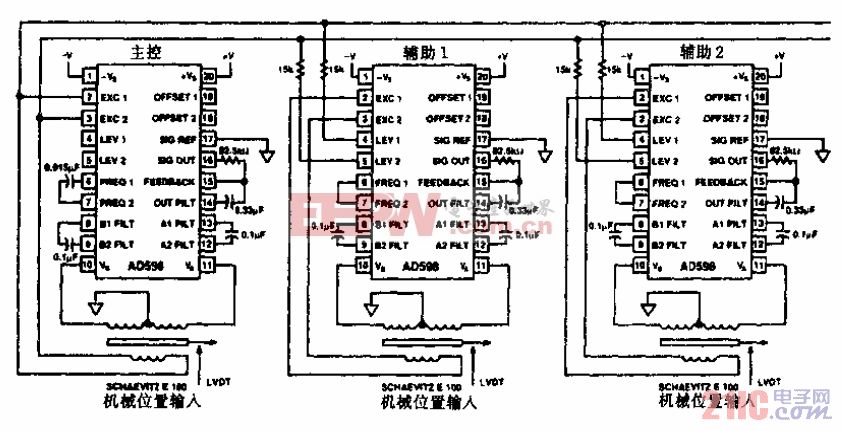
通用LVDT信號調理電路

對于LVDT信號調理電路而言,輸出噪聲的主要來源是AD698的輸出紋波。相比之下,其他噪聲源( AD8615)的電阻噪聲、輸入電壓噪聲和輸出電壓噪聲)要小得多。
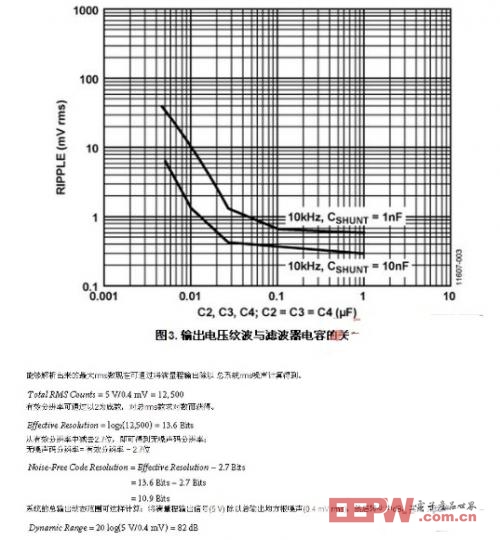
當電容值為0.39μF且反饋電阻兩端的并聯電容為10 nF(如圖3所示)時,AD698的輸出電壓紋波為0.4 mV rms.請注意,圖1中的簡化原理圖并未顯示這些器件以及相關的引腳連接;但詳情可參見AD698數據手冊。
AD7992作為此應用的良好備用器件,與3.4 MHz串行時鐘配合使用時,具有12位分辨率和每通道188 kSPS的采樣速率。
相位滯后/超前補償
AD698將返回信號與初級端參考振蕩器的輸入相乘,并通過解調產生輸出信號。少量的相移就會導致大量的線性誤差,對輸出而言就是欠沖。
相位超前網絡可補償E-100系列LVDT中初級到次級的?3°相移。圖4顯示了兩種不同的相位補償網絡。
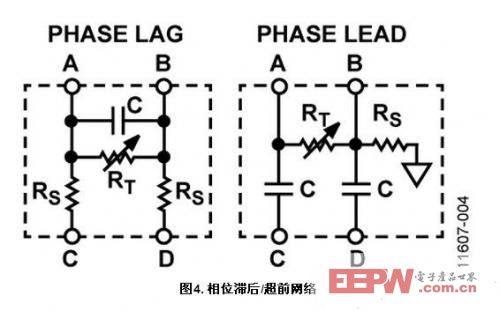
為合適的網絡選取元件值時,重要的是需注意RS和R T有效地構成了一個電阻分壓器,在激勵信號達到AD698的±ACOMP輸入之前降低其幅度。這表示R T需比RS大得多。滯后/超前電路還給激勵輸出增加負載,因此建議采用較大的電阻值。最終目標是以較小的幅度下降,在AD698ACOMP輸入端達到所需的相位滯后/超前。
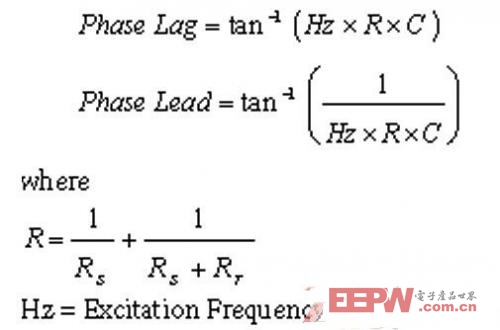
根據下列等式可算出相位滯后/超前的量:
測試結果
使用連接J3的Measurement Specialties,Inc. E-100經濟型LVDT,并通過數字示波器監控EVAL-CN0301-SDPZ評估板上AD698J6的輸出,則實際輸出紋波為6.6 mV p-p,如圖5所示。
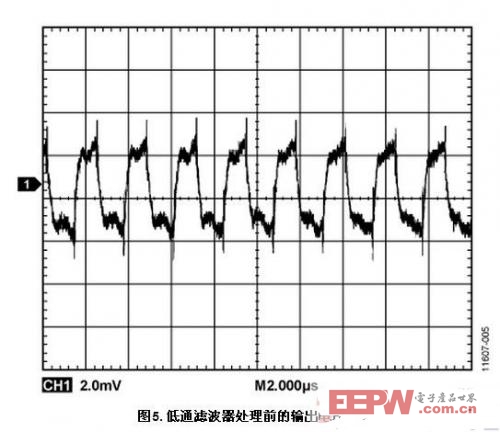
AD698輸出和AD8615輸入之間的低通濾波器(3 kΩ、0.01μF) ?3 dB帶寬為5.3 kHz,并可將紋波降低至2 mV p-p.
由于低通濾波器位于AD698輸出級和AD8615輸入級之間,數據便可從EVAL-CN0301-SDPZ評估板收集,如圖6所示。
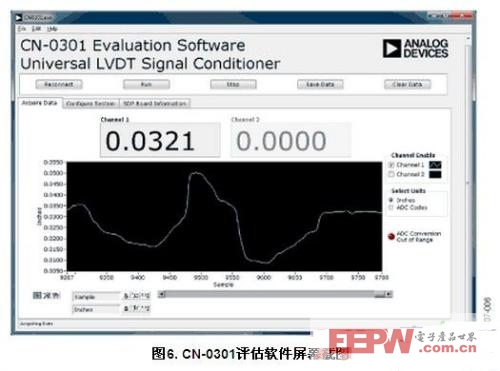
AD698的紋波衰減至2 mV p-p,并且系統可獲得11位無噪聲代碼分辨率。
有關本電路筆記的完整設計支持包,請參閱http://www.analog.com/CN0301-DesignSupport.
飛行控制表面位置反饋中的應用
在美國,無人駕駛飛行器(UAV),或稱無人駕駛飛機,正在國家安全方面扮演著越來越重要的角色。這些高科技、復雜的高空作業平臺受控于數英里外的人員,并且支持多任務。它們含有諸如空中偵察、作戰武器平臺、戰場戰區指揮和控制監督或無人空中加油站等功能。
UAV上這種復雜的系統采用無數電子傳感器,用于精確控制和反饋。若要控制UAV的高度(俯仰、滾動和偏航),則需使用執行器對飛行控制表面施加作用力。這些執行器能否對位置實現精確測量對于保持正確的飛行路徑非常關鍵。
用于測量執行器位置的傳感器需要滿足三個基本標準:精度高、可靠性高和重量輕。由Measurement Specialties,Inc.公司設計的LVDT可滿足全部三個屬性。

電路相關文章:電路分析基礎
pa相關文章:pa是什么
模數轉換器相關文章:模數轉換器工作原理
低通濾波器相關文章:低通濾波器原理
評論