智能追光鋰電充電系統設計

(7)追光控制
本文引用地址:http://www.104case.com/article/258302.htm方案一:采用雙舵機,搭建舵機云臺。此方法可以全方位的追光,但是在實際使用中,舵機存在“搶電”的現象,會給供電電壓帶來較大的波動,甚至會產生較強的抖動,不利于控制,也不利于電能的收集。
方案二:只采用一個舵機,并結合機械追光。經查閱資料,當太陽能電池板與地平面的角度和當地的維度相同時,光能利用率最大。本方案中利用的機械部件,可人為的調節太陽能電池板與地平面的角度,再通過控制伺服舵機實現追光。
通過比較,我們選用方案二。方案二更節約電能,同時,在太陽能電池板的不同位置放置三個光敏電阻,利用光敏電阻對環境亮暗的敏感性設計尋找光源傳感器,即光敏電阻和已知電阻的分壓電路,采集光敏電阻端和已知電阻端電壓,通過模擬量的電壓分析,即可模糊地判斷光線的強弱。與另兩路尋光傳感器電路中得到的電壓值相比較,即可判斷出光源的位置。利用單舵機機械結構實時把光源位置方向鎖在正中間光敏電阻所對的方向。
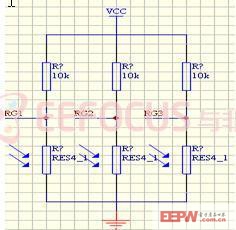
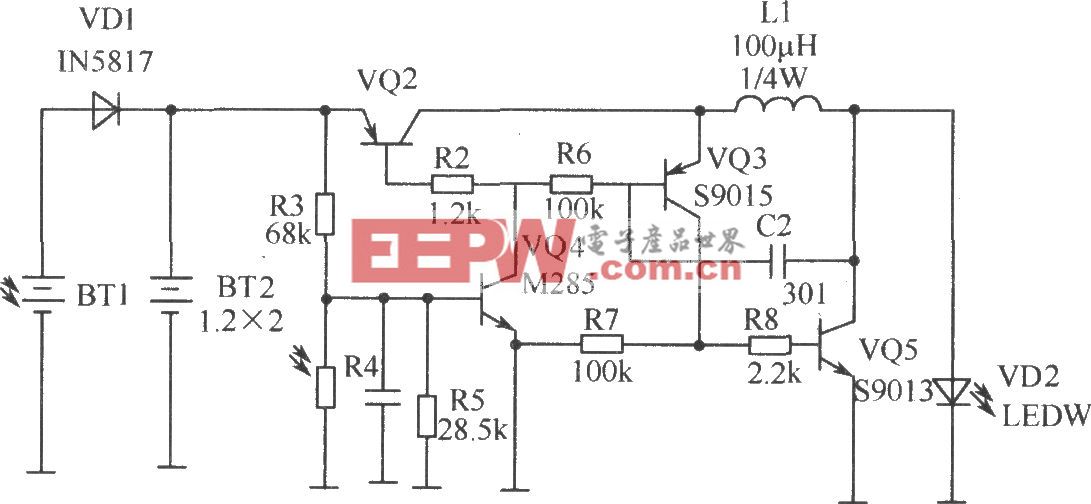
圖17光敏電阻檢測
由于光敏電阻對環境的敏感性,導致環境中的散光造成的同一規格的光敏電阻在相同照度下電阻值不同。為此,在每個光敏電阻前加黑色筒狀遮體,使光敏電阻的基準電阻值基本相同,為檢測光源時三者電阻值的比較有統一標準,提高光源檢測的精確度。
采集的電壓值為模擬量,提高了光源檢測的空間精度,模擬量亦可以作比較,賦相應的比例系數、微分系數代入舵機控制軟件模塊。光敏電阻檢測光源電路圖如圖17所示。
在實際使用中發現,當出現外界干擾信號,供電電源的電壓不足等情況時,會造成舵機抖動,所以我們采用獨立的單片機和獨立的電源完成追
光,避免了信號干擾和電壓不足產生的抖動,同時,也避免了因舵機“搶電”造成的其他模塊電壓不穩定的問題。
獨立電源來自鋰電池,通過PT1301 IC芯片升壓后供舵機使用,并且添加負載指示燈(藍色)和鋰電池電壓過低報警指示燈(黃色)。詳細資料請參見附錄二。
其中,主要程序如下:
#define steer_center 60
#define right_limit 100
#define left_limit 20
#define KP 10 //比例系數
sbit pwm=P3^7;
uchar rg1,rg2,rg3;
uchar last_pwm_value_init; //上一次舵機輸出值初始化
uchar control_pwm; //舵機PWM輸出值
uchar last_control_pwm; //上一次舵機PWM輸出值
void get_analog() //采集三路光敏電阻采光系統中的電壓值
{
rg1=GetADCResult(0);
rg2=GetADCResult(1);
rg3=GetADCResult(2);
}
uchar analog_analyse()
{
get_analog();
if(last_pwm_value_init==0)
{
last_control_pwm=steer_center;
last_pwm_value_init=1; //初始化完成
}
if(rg2-rg1>0rg3>=rg2)
control_pwm=last_control_pwm-(rg2-rg1)*KP/80;
else if(rg2-rg3>0rg1>=rg2)
control_pwm=last_control_pwm+(rg2-rg3)*KP/80;
else if(rg1-rg2>0rg3-rg2>0)
{
if(rg280)
{
control_pwm=last_control_pwm;
}
//else //control_pwm=last_control_pwm+(rg1-rg2)*8/80-(rg3-rg2)*8/80; //也進行角度調節
}
else
control_pwm=steer_center;
if(control_pwm=left_limit)
control_pwm=left_limit;
else if(control_pwm>=right_limit)
control_pwm=right_limit;
last_control_pwm=control_pwm; //保存上一次舵機輸出值
return control_pwm;}
void main()
{
uchar PWM;
InitADC(); //AD初始化
Init_PCA(); //PCA擴展定時器初始化
while(1)
{
PWM=analog_analyse();
jd=PWM;
Delay(12);
}
}
void PCA_ISR()interrupt 7
{
CCF1=0;
CCAP1L=value;
CCAP1H=value>>8;
value+=25;
if(cnt = jd) //判斷0.025ms次數是否小于角度標識jd=20-100
pwm=1; //小于,PWM輸出高電平
else
pwm=0; //大于則輸出低電平
if (cnt>=800)
cnt=0;
else
cnt++; //0.025ms次數加1 ,次數始終保持為800 即保持周期為20ms
}
(8)主控單元
方案一:采用AVR 單片機 ,AVR單片機的I/O口是真正的I/O口,能正確反映I/O口輸入/輸出的真實情況。工業級產品,具有大電流(灌電流)10~40 mA,可直接驅動可控硅SCR或繼電器,節省了外圍驅動器件。
AVR單片機內帶模擬比較器,I/O口可用作A/D轉換,可組成廉價的A/D轉換器。ATmega48/8/16等器件具有8路10位A/D。
部分AVR單片機可組成零外設元件單片機系統,使該類單片機無外加元器件即可工作,簡單方便,成本又低。
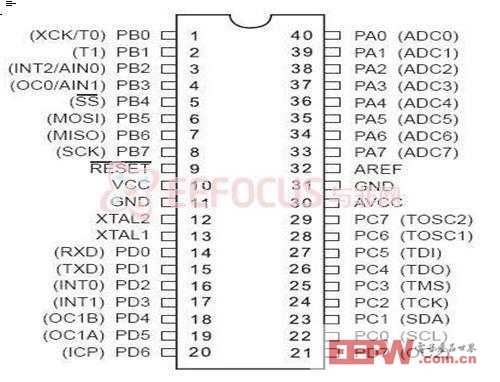
圖18 AVR MCU管腳分布
AVR單片機可重設啟動復位,以提高單片機工作的可靠性。有看門狗定時器實行安全保護,可防止程序走亂(飛),提高了產品的抗干擾能力。AVR MCU管腳分布如圖18所示。
方案二:采用新一代增強型8051單片機STC12C5A60S2,此單片機具有兩路PWM/PCA功能;8路10位A/D采集,轉換速度25萬次/秒;雙串口;內部集成MAX810專用復位電路;具有60K的用戶程序空間;內部集成掉電檢測電路;可擴展為4個16位定時器;7路外部中斷;工作頻率范圍為0-35MHZ,相當于普通8051的0-420MHZ;指令代碼完全兼容傳統的8051單片機。
綜上兩種方案,因所需的A/D檢測通道較多,我們選用方案二中的STC12C5A60S2單片機作為主控芯片。
風力發電機相關文章:風力發電機原理





評論