數字機頂盒人機交互組件的設計

三網融合和信息技術的發展引發了有線電視的數字化整體平移,數字電視機頂盒則是終端用戶接收數字電視和CATV寬帶綜合服務的平臺。數字電視機頂盒不可缺少的模塊是用戶交互組件的設計與實現,其目標是以簡單的方式提供對電視屏幕的選擇控制,同時提供可視反饋信息和瀏覽[1]。遙控接收是最主要和最便利的用戶交互組件,軟件位于嵌入式系統的上層。
1 交互組件的基本工作原理與鍵值規范
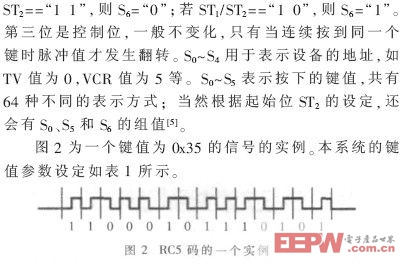
遙控器將遙控信號(二進制脈沖碼)調制在38 kHz的載波上,經緩沖放大后送至紅外發光二極管,轉化為紅外信號發射給遙控紅外接收模塊,后者將用戶指令轉換成相應的鍵值,發送給嵌入式系統來執行相應的處理和操作,從而實現人機交互[2]。二進制脈沖碼的形式有多種,其中最為常用的是脈沖寬度調制碼(PWM)、脈沖位置調制碼(PPM)和RC5(Remote Control 5)碼等[3]。本系統交互遙控器組件設計采用符合Philips RC5P標準的信號,RC5碼的格式如圖1所示[4]。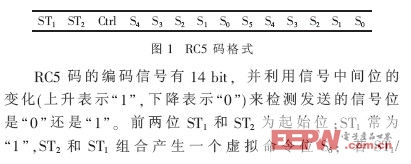
2 交互組件軟件設計與實現
交互實現的流程是:遙控信號觸發一個中斷并將接收到的碼值存入一指定的緩沖器中,同時發送一個信號給應用程序中專門負責接收遙控器按鍵值的任務。此任務不斷地讀取遙控信號,一旦檢測到信號,就到指定的緩沖器中將碼值讀出,再按照事先規定好的遙控器碼值對應表轉換為應用程序可以識別的鍵,并通過消息隊列發送給用戶接口界面程序,由它對按鍵進行響應,并進行相應的處理操作[2]。首先構造遙控器相關的狀態及數據類型如下:
遙控器脈沖的類型
typedef struct PULSE {
u_int32 length;
bool high;
bool shortpulse;
bool longpulse;
bool interwordpulse; } PULSE, * PPULSE;
遙控器狀態枚舉變量
enum irstate
{
STATE_HEADER_SEARCH,
STATE_MODE_SEARCH,
STATE_TRAILER_SEARCH,
STATE_CUSTOMER_SEARCH,
STATE_BSKYBMODE_SEARCH,
STATE_CMD_SEARCH,
STATE_SFT_SEARCH
};
遙控器解碼應用的類型
typedef struct IRDECODE_INSTANCE {
enum irstate current_state;
u_int32 packet;
u_int32 last_packet;
u_int32 num_bits;
u_int32 prev_bit;
u_int32 mid_bit;
u_int32 last_cnxtcode;
bool sent_key_up;
bool last_matched;
}IRDECODE_INSTANCE,*PIRDECODE_INSTANCE;
交互組件的軟件模塊主要完成初始化、中斷處理、鍵值信號處理等任務。
2.1 初始化
組件初始化通過一些函數模塊主要完成以下任務:
(1)初始化定時器、端口引腳。通過軟件函數分別實現前/后端硬件和端口的初始化。
(2)檢測端口初始化是否完成,設置寄存器值,創建信號量,當有中斷時給解碼任務發送消息。
(3)使能中斷,啟動中斷處理程序。
為了提高交互組件響應的快速性,在初始化過程中需要以較高的優先級配置遙控器中斷寄存器。
2.2 中斷處理
中斷處理函數先將接收到的脈沖信號存入先進先出(FIFO)存儲器,同時產生一個中斷信號,觸發中斷處理程序從FIFO存儲器中讀出信號,存入緩存,再發送一個消息觸發解碼任務,從而進行脈沖信號的解碼處理。
2.3 鍵值信號處理
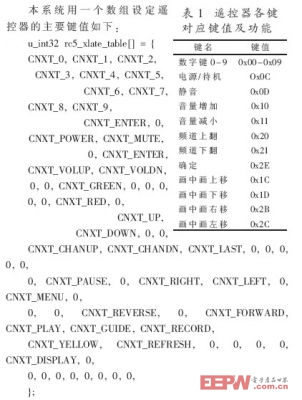
接收到中斷處理程序發出的消息后,鍵值處理任務啟動,讀取緩存中的信號值,并調用ir_state_change()函數來實現信號的解碼,從RC5碼中得到系統能夠識別的鍵值,取得與表1中相應的鍵值,發送鍵值消息到Process_keystroke()函數,嵌入式系統主CPU根據接收到的具體IR鍵值和對應的功能完成相應的操作。IR_Decode()函數實現鍵值信號處理即脈沖信號解碼過程,流程如圖3所示。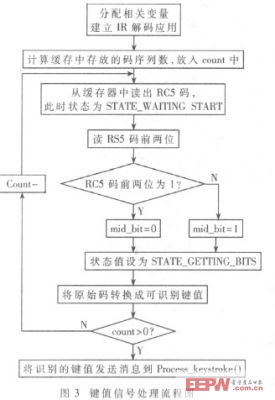
具體實現代碼:
void IR_Decode(void * pinst_decode, PIRRX_DATAINFO
pdatainfo, PIRRX_KEYINFO pkeyinfo)
{ PIRDECODE_INSTANCE pinstance;
u_int16 count;
pinstance =(PIRDECODE_INSTANCE)pinst_decode;
count = query_data(pdatainfo->iwrite, pdatainfo->iread);
while (count > 0)
{trace_new(TR_IRD,nRC5DECOD: IRData 0x%8.8X ,
pdatainfo->data[pdatainfo->iread]);
pinstance->current_state = ir_state_change(pinstance, pdatainfo,
count, pkeyinfo);
count = query_data(pdatainfo->iwrite, pdatainfo->iread);
}
}
3 系統測試與運行
作為一種支持光纜與同軸電纜混合網(HFC)綜合業務的嵌入式電子設備,在數字電視機頂盒樣機上進行調試,并運行基于電纜調制解調器(Cable Modem)的網絡接入和數字電視接收服務,運行效果良好,人機交互響應快、時延小。運行測試效果圖如圖4所示。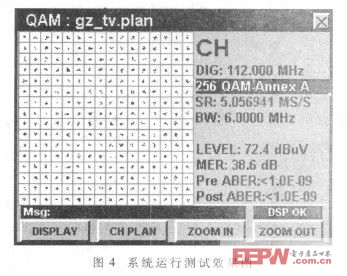
本文設計實現了能支持數字電視、數據廣播等綜合業務機頂盒的交互組件的數據結構、軟件流程,并在嵌入式操作系統VxWorks軟件環境下完成了調試運行,運行結果滿足人機交互的業務需求和實時性要求。






評論