基于雙核多接口的智能汽車控制系統設計方案

系統基本構建如圖1所示,包括傳感器信號采集處理、動力電機驅動、轉向舵機控制以及控制算法軟件開發等。
雙核的引入
在智能車的設計之初,我們分析認為,在基于光電傳感器的智能車設計系統中重要的是信號的完整性,即通過傳感器獲得賽道信息和車的位置信息越多越好。通過比較8位和16位單片機的接口數目與性能要求,本設計決定使用兩片8位微控制器MC9S08DZ60作為核心控制單元。
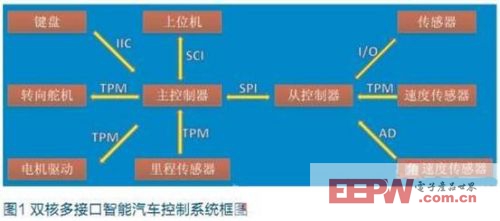
雙核間通信接口SPI
在車輛運行過程中,三種傳感器的信息需要由控制器來采集,分別是光電傳感器、速度傳感器、角速度傳感器。由于角速度傳感器需要有一個準確的采樣周期,我們使用單片機的內部定時器產生一個1.2ms的時間基準。在這個1.2ms的周期里執行對三種傳感器的數據采集,當定時器的溢出中斷時執行一次SPI的數據發送程序。SPI是一種高速、全雙工、同步的通信總線,并且在芯片的引腳上只占用四根線,分別是mosi,miso,sck,ss。我們使用1MHz的數據傳輸速度,使用3個字節來發送傳感器的數據,兩個字節發送速度傳感器和角速度傳感器的數據。
控制系統與上位機的通信接口SCI
車輛在行駛過程中的運行狀況,是無法直接通過觀察來得到的,所以我們使用上位機系統來進行實時監控。使用wap200b無線串口模塊來發送數據,模塊使用3.0V供電,內置高速MCU,數據傳輸準確率高。單片機與模塊間通訊使用標準串口,將其設置為115200波特率、8位數據位、1位停止位、無奇偶校驗。一次通訊共發送7個數據。首先發送兩個數據作為握手信號分別是0x00和0xFF,之后使用3個字節的數據發送傳感器信息,1個字節數據發送角度信息,1個字節數據發送速度信息,最后一位保留位做以后擴展使用,發送0x00。
鍵盤與主控芯片的通信接口I2C
車輛在實際調試時有許多參數需要不停的調試,如PID參數車輛的轉角及速度等。設置不同的參數時如果每次都重新下載程序的話會費時費力,所以在這里我們使用鍵盤來輸入車輛行駛時的參數。鍵盤控制芯片HD7279是一片具有串行接口的,可同時驅動8位共陰極數碼管(或64只獨立的LED)的智能顯示驅動芯片,該芯片同時還可連接多達64鍵的鍵盤矩陣,單片即可完成LED顯示、鍵盤接口的全部功能。
我們使用單片機的4個I/O口來操作HD7279,分別為CS、CLK、DATA、KEY 。在這里我們可以通過鍵盤來設置一些參數,如PID的Kp、Ki、Kd參數,直線及彎道的速度等。
A/D模塊在采集角速度中的應用
本系統中A/D轉換模塊主要用于采集陀螺儀的輸出值。由于模擬陀螺造價比較低,而在車模控制系統中對角度精度的要求不是很高,所以使用模擬陀螺對車身姿態進行實時校正。MC9S08DZ60內部集成了12位數模轉換通道。由于模擬陀螺輸出信號范圍為0~5V,這樣單片機的參考電壓為+5V,由高精度穩壓模塊單獨供電,確保轉換的精度。對A/D轉換后的數據處理程序如下:
void Gyro_Process(void)
{
if(Gyro_Start == 1)
{
unsigned int Max,Min,i,Value;
signed long Sum;
Gyro_Data_Num = 0;
while(Gyro_Data_Num 13)
{
Gyro_Collection();//AD轉換
后的數據采集函數
}
Gyro_Start = 0;
for(i=1,Max=0,Min=0xffff,Sum
=0;i13;i++)
{
Value=Gyro_Data_BUF[i];
Sum+=Value;
if(Max
Max=Value;
if(Min>Value)
Min=Value;
}
Sum= Sum-Max-Min ;
SUM_Test = Sum;
CarAngel_V=((((signed long)(Sum/10)- (signed long)Gyro_MidValue)*10000)>>16);
/限幅處理/
if(CarAngel_V > 0)
{
CarAngel_V = (CarAngel_V *
1013) / 1000;
}
if(CarAngel_V0)
{
CarAngel_V = (CarAngel_V *
1004)/ 1000;
}
if(CarAngel_V>32767)
{
CarAngel_V=32767;
}
if(CarAngel_V-32767)
{
CarAngel_V=-32767;
}
if(Gyro_Calibration_Flag == 1)
CarAngelRate = (unsigned int)
(CarAngel_V + 32767);
else
CarAngelRate = 32767;
}
}
TPM模塊在伺服電機中的應用
MC9S08DZ60擁有8路獨立的PWM通道,可以獨立配置PWM的頻率和占空比,最高頻率為總線時鐘頻率20MHz,可以滿足對舵機和電機的控制。同時此模塊還有兩路計數器模塊,可以采集碼盤返回的電機速度值,以便用于速度閉環控制。其中電機控制中的PWM初始化如下:
void Motor_init(void)
{
TPM2SC = 0x00; /* Stop and
reset counter */
TPM2MOD = VV_MAX;//15khz /* Period value setting */
(void)(TPM2C0SC == 0); /* Channel 0 int. flag clearing (first part) */
/* TPM2C0SC: CH0F=0,CH0IE=0,MS0B=1,MS0A=0,ELS0B=0,ELS0A=4 */
TPM2C0SC = 0x24;
/* Int. flag clearing (2nd part) and channel 0 contr. register setting */
TPM2C0V = VV_MAX/2; //50%占空比 /* Compare 0 value setting */
(void)(TPM2SC == 0); /* Overflow int. flag clearing (first part) */
/* TPM2SC: TOF=0,TOIE=0,CPWMS=0,CLKSB=0,CLKSA=1,PS2=0,PS1=0,PS0=0 */
TPM2SC = 0x08; /* Int. flag clearing (2nd part) and timer control register setting */
}
普通I/O接口的應用
MC9S08DZ60單片機的普通I/O口操作可以用于邏輯控制、顯示控制、信息采集等,其中對各個引腳的配置也比較簡單,需要配置方向寄存器PTXDD、上拉使能寄存器PTXPE,壓擺率寄存器PTXSE及數據寄存器PTXD,以A口為例:
Int_A()
{
PTADD=0X00;//作為輸入
PTAPE=0XFF;//上拉使能
PTASE=0XFF;//壓擺率使能
}
程序需要讀取A口數據時直接讀出PTAD寄存器的值即可。
結語
該系統實現了智能車車中各模塊間的通信,對芯片的資源進行了充分的利用,實現了智能車多狀態的實時監測,保證了車模的速度控制和路徑優化,為以后的技術發展提供了很好的平臺。

伺服電機相關文章:伺服電機工作原理




評論