基于DSP和L298N的懸掛運(yùn)動控制系統(tǒng)設(shè)計

摘要:介紹了由TMS320F28027和L298N模塊以及編碼器組成的懸掛運(yùn)動控制系統(tǒng)。該系統(tǒng)通過控制2個步進(jìn)電機(jī),控制軸上線的收放來達(dá)到使懸掛物在平面內(nèi)任意運(yùn)動的效果,以實現(xiàn)畫圓或指定圖案和顯示當(dāng)前坐標(biāo)等功能。主要介紹了步進(jìn)電機(jī)的控制算法和利用TMS320F28027芯片實現(xiàn)位置閉環(huán)控制的方法。該系統(tǒng)具有高效、穩(wěn)定、準(zhǔn)確等優(yōu)點(diǎn)。
本文引用地址:http://www.104case.com/article/255893.htm引言
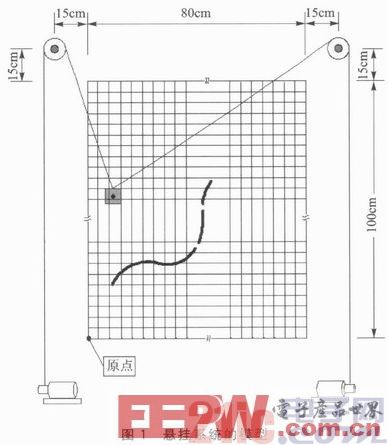
隨著TI公司32位DSP的普及,32位處理器已經(jīng)成為控制領(lǐng)域的主流產(chǎn)品,與傳統(tǒng)的微處理器相比速度更快、性能更強(qiáng)、資源豐富,更符合發(fā)展的腳步。TMS320F28027是一款32位的DSP,具有運(yùn)算速度快、穩(wěn)定性高的優(yōu)點(diǎn)。本文利用TMS320F28027控制兩個步進(jìn)電機(jī),從而使物體在平面內(nèi)運(yùn)動,實現(xiàn)物體在平面內(nèi)可以任意地畫指定的曲線和圓等。圖1為懸掛系統(tǒng)的模型。
1 系統(tǒng)總體方案的設(shè)計
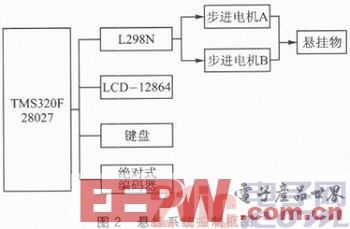
圖2為懸掛系統(tǒng)控制框圖,以TMS320F28027為控制芯片,利用L298N驅(qū)動兩個步進(jìn)電機(jī)。步進(jìn)電機(jī)采用42HS4813A4,其額定電流為1.3 A,步距角為1.8°,利用LCD-12864液晶顯示被控制物的實時坐標(biāo)。控制2個步進(jìn)電機(jī)正向、反向轉(zhuǎn)動來達(dá)到物體在平面內(nèi)任意運(yùn)動的效果。
2 硬件電路設(shè)計
2.1 L298N
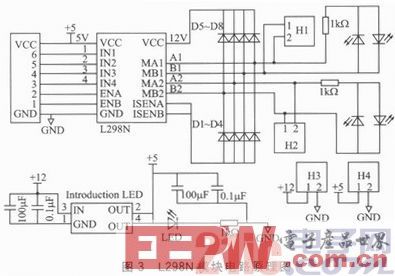
L298N是ST公司生產(chǎn)的一種高電壓、大電流電機(jī)驅(qū)動芯片。圖3為L298N模塊的電路原理圖。該芯片的主要特點(diǎn)是:工作電壓高,其最高工作電壓可達(dá)46 V;輸出電流大,瞬間峰值電流可達(dá)3 A,持續(xù)工作電流為2 A;內(nèi)含兩個H橋的高電壓大電流全橋式驅(qū)動器。利用2個L298N來分別控制2個步進(jìn)電機(jī),步進(jìn)電機(jī)的額定電流為1.3 A,同時通2相時,電流為2.6 A,L298N可以達(dá)到42HS4813A4步進(jìn)電機(jī)的電流要求。
2.2 絕對式編碼器
絕對式編碼器的精度必須要高于步進(jìn)電機(jī)的精度,所以這里采用的是10位絕對式編碼器。選用的型號是Minil024J,精度為10位,優(yōu)點(diǎn)在于采用無接觸霍爾檢測技術(shù),傳感器運(yùn)行不受灰塵或其他雜物影響,很好克服了基于光學(xué)檢測原理的缺點(diǎn)。
3 系統(tǒng)軟件設(shè)計
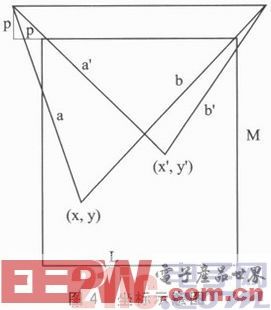
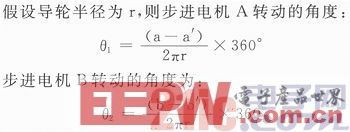
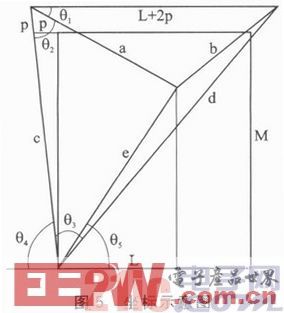
3.1 幾何關(guān)系1:從任意點(diǎn)移動到任意點(diǎn)算法
坐標(biāo)示意圖如圖4所示,有如下的邊長和角度關(guān)系:

3.2 幾何關(guān)系2:當(dāng)前位置坐標(biāo)顯示算法
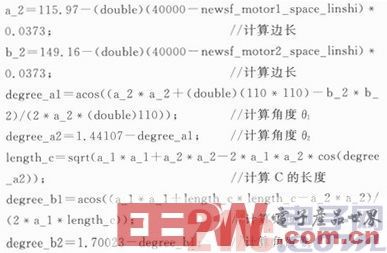
如圖5所示,存在以下的角度和邊長關(guān)系:

控制代碼如下:
3.3 電機(jī)位置閉環(huán)控制方法
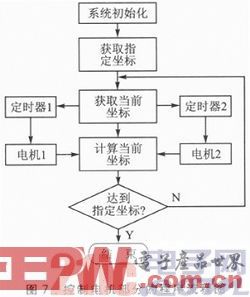
步進(jìn)電機(jī)閉環(huán)控制框圖如圖6所示,TMS320F28027分別用2個定時器來控制兩個電機(jī),用絕對式編碼器對位置進(jìn)行監(jiān)控,進(jìn)行失步補(bǔ)償,保證位置正確,并且可以使曲線圓滑。

步進(jìn)電機(jī)的型號為42HS4813A4,為了防止失步,步進(jìn)電機(jī)每步的最小間隔為4 ms,并且用軟件對步進(jìn)電機(jī)進(jìn)行了十六細(xì)分,即每步的間距為0.45°。控制電機(jī)部分的程序流程圖如圖7所示。
控制代碼如下:
newsf_motorl_SpeedAndSpace_access((int)flag_motorl_paces,flag_cputimer_1,2); //定時器1控制步進(jìn)電機(jī)1
newsf_motor2_SpeedAndSpace_acccss((int)flag_motor2 paces,flag_cputimer_2,2); //定時器2控制步進(jìn)電機(jī)2
3.4 畫圖算法
利用幾何關(guān)系任意點(diǎn)到任意點(diǎn)的算法,分別給處理器一連串的位置坐標(biāo),控制物體的運(yùn)動軌跡,如圖8所示。
相同間隔取N個點(diǎn),分別輸入處理器,來控制物體的坐標(biāo)。將取的點(diǎn)傳遞給TMS320F28027時,為了讓圓足夠的平滑,消去鋸齒狀,所以在圓上取了200個點(diǎn)。控制代碼如下所示:

霍爾傳感器相關(guān)文章:霍爾傳感器工作原理
霍爾傳感器相關(guān)文章:霍爾傳感器原理 三相異步電動機(jī)相關(guān)文章:三相異步電動機(jī)原理









評論