基于Saber的無刷直流電機(jī)控制系統(tǒng)仿真

如圖4為一個(gè)三相逆變器的半橋電路原理圖。
本文引用地址:http://www.104case.com/article/255831.htm
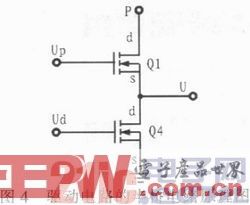
對(duì)于低端的管子Q4,由于其源極(s)接地,所以當(dāng)控制Q4導(dǎo)通時(shí),只要在Q4的柵極加大于閾值的電壓信號(hào)Ud即可;但對(duì)于高端的管子Q1,由于其源極電位U是浮動(dòng)的,僅靠單獨(dú)在Q1的柵極上施加電壓信號(hào)Up控制Q1導(dǎo)通比較困難。
基于以上分析,功率開關(guān)管一般采用直接驅(qū)動(dòng)和隔離驅(qū)動(dòng)兩種方式。對(duì)于隔離驅(qū)動(dòng)模式,6個(gè)功率開關(guān)器件都采用獨(dú)立的驅(qū)動(dòng)電路驅(qū)動(dòng),都需要一組輔助電源,各個(gè)電路之間還要互相懸浮,增加了電路的復(fù)雜性,可靠性下降。而自舉型功率橋驅(qū)動(dòng)集成電路具有獨(dú)立的低端和高端輸入通道,懸浮電壓采用內(nèi)置自舉電路完成,僅需要一個(gè)直流電源,就可輸出半橋功率開關(guān)管的驅(qū)動(dòng)脈沖。
本文三相逆變橋的功率驅(qū)動(dòng)集成電路采用IR美國國際整流器公司生產(chǎn)的專用驅(qū)動(dòng)芯片IR2110,功率開關(guān)管選用MOSFKTIRFP260N。IR2110驅(qū)動(dòng)一個(gè)半橋的電路如圖5所示。其中,C1、VD分別為自舉電容和二極管,Rg為柵極串聯(lián)電阻。
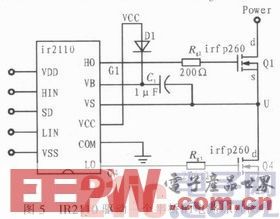
自舉電容C1用來給高端IRFP260N提供懸浮電源。一個(gè)半橋的高端管在導(dǎo)通前需要先對(duì)自舉電容C1充電,當(dāng)C1兩端電壓超過閾值電壓,高端管開始導(dǎo)通。自舉電容必須能夠提供功率管導(dǎo)通時(shí)所需要的柵極電荷,并且在控制高端管導(dǎo)通期間,自舉電容兩端電壓要基本保持不變。自舉電容過小,導(dǎo)致自舉電容可能有較大的紋波。自舉電容取值一般為0.1~1μF,這里選擇自舉電容值為1 μF。
當(dāng)高端IRFP260N管開啟時(shí),自舉二極管D1必須承受著和IRFP260N漏極相同的電壓,所以二極管的反向承受電壓要大于母線電壓,并且應(yīng)該是快恢復(fù)二極管,以減少自舉電容向電源的回饋電荷。
建立逆變器電路的仿真分析模型并進(jìn)行仿真分析,高端管Q1、低端管Q4的控制信號(hào)G1_C、G4_C,Q1管的柵極驅(qū)動(dòng)信號(hào)Q1_G,柵源電壓Q1_GS,Q1、Q2的中點(diǎn)電位U,Q4管的柵極驅(qū)動(dòng)電壓Q4_G仿真分析結(jié)果如圖6所示。
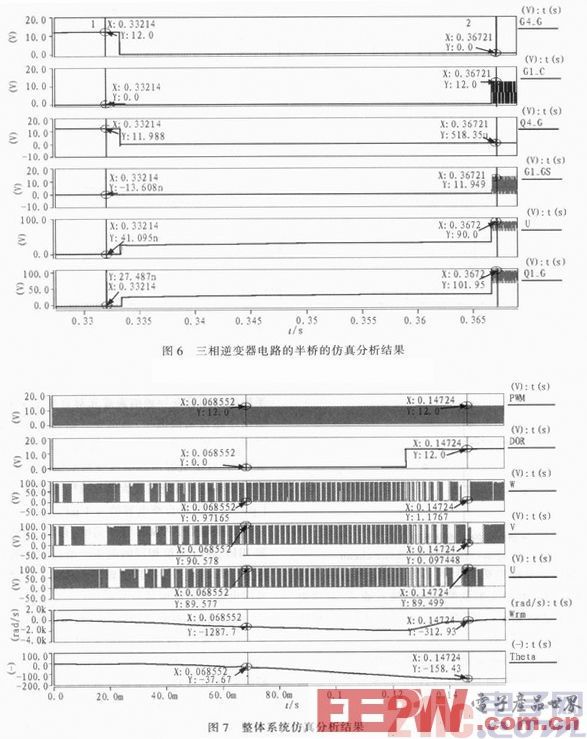
在圖6中,在時(shí)刻“1”,低端Q4功率管的控制信號(hào)Q4_C有效,經(jīng)過驅(qū)動(dòng)集成電路IR2110后,Q2的柵極驅(qū)動(dòng)信號(hào)Q2_G為11.988 V,其柵源電壓大于IRFP260的導(dǎo)通閾值,Q2導(dǎo)通,此時(shí)Q1管關(guān)斷;在時(shí)刻“2”,低端Q1功率管的控制信號(hào)Q1_C有效,經(jīng)過IR2110后,Q1的源極電位U為90V,Q1的柵極電位Q1_C被自舉電容升高到101.95V,此時(shí)Q1的柵源電壓Q1_GS為11.95V,大于功率管的導(dǎo)通閾值,Q1導(dǎo)通,此時(shí)Q2關(guān)閉。可以看到,三相逆變器電路的設(shè)計(jì)可以可靠控制功率管的開通和關(guān)斷。
2 系統(tǒng)功能仿真
設(shè)置無刷直流電機(jī)參數(shù)如下,2對(duì)極,單相繞組電阻為1.65 Ω,繞組電感為1 mH,反電動(dòng)勢(shì)系數(shù)ke=0.048,轉(zhuǎn)子轉(zhuǎn)動(dòng)慣量為j=4.189 x10-6 kg*m2。設(shè)置PWM占空比為0.6,頻率為10 kHz,對(duì)整個(gè)電機(jī)控制系統(tǒng)進(jìn)行仿真。三相繞組的電壓U、V、W,電機(jī)轉(zhuǎn)速Wrm,電機(jī)轉(zhuǎn)子機(jī)械轉(zhuǎn)角Theta的仿真分析結(jié)果如圖7所示。
由上圖可以看到,由于PWM占空比為0.6,無論正向轉(zhuǎn)動(dòng)還是負(fù)向轉(zhuǎn)動(dòng),電機(jī)均處于加速狀態(tài):當(dāng)DIR為“0”時(shí),電機(jī)向負(fù)方向轉(zhuǎn)動(dòng);當(dāng)DIR為“1”時(shí),電機(jī)正向轉(zhuǎn)動(dòng)。從結(jié)果可以看到,無刷直流電機(jī)控制系統(tǒng)工作正常。
3 結(jié)論
本文利用仿真軟件Saber完成了無刷直流控制系統(tǒng)的建模與分析,系統(tǒng)仿真試驗(yàn)證明,控制系統(tǒng)工作正常,仿真精度高,其仿真結(jié)果與理論分析相吻合。Matlab/Simulink仿真軟件主要適合電機(jī)控制系統(tǒng)研究,Pspice仿真丁具主要適合電力電子電路的分析,Saber軟件包含豐富的電力電子元器件、電機(jī)模型庫,運(yùn)算精度高,同時(shí)具備以上兩種分析工具的優(yōu)點(diǎn)。因此,基于Saber的電機(jī)控制系統(tǒng)的仿真分析,可以在掌握系統(tǒng)的動(dòng)態(tài)特性的同時(shí),實(shí)現(xiàn)對(duì)電路設(shè)計(jì)的詳細(xì)設(shè)計(jì)和精細(xì)分析,對(duì)控制策略、算法進(jìn)行驗(yàn)證,從而更加有效地進(jìn)行系統(tǒng)和分系統(tǒng)設(shè)計(jì)為電機(jī)控制系統(tǒng)的應(yīng)用提供了非常有效的設(shè)計(jì)手段。

pwm相關(guān)文章:pwm是什么
霍爾傳感器相關(guān)文章:霍爾傳感器工作原理
霍爾傳感器相關(guān)文章:霍爾傳感器原理







評(píng)論