無線MIMO架構測試的不同種類及開發策略

為MIMO系統建模必須考慮多數據流的數量,包括到達接收機的直接和反射信號。按照傳統的方法,將發射器分別表示為 Tx1,Tx2,…,Txn,將接收機表示為Rx1,Rx2,…,Rxn,一個MIMO通信系統可由一個矩陣信號向量hxy的形式表示,其中x表示發射機的數量,y表示接收機的數量。例如,h21表示兩個發射機和一個接收機,而h22表示兩個發射機和兩個接收機(如圖2所示)。通過這種方法,一個MIMO 信道可以這樣建模:
y=H*x+n
式中:y為接收信號向量,H為信道矩陣(hxy信號元素),x為發射信號向量,n為噪聲向量。
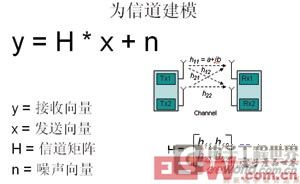
圖2 MIMO系統中的無線信道可由一系列不同的向量來表示
不同的信道對接收信號產生影響,例如,衰減和多經影響,可由同樣的代數方程矯正,關系式為
Rx=H*Tx+n
式中:Rx表示接收天線的Rx1,Rx2,…,Rxn矩陣,Tx表示發射天線的Tx1,Tx2,…,Txn矩陣。對于一個2×2 MIMO系統,關系如圖2的矩陣。
這些關系式中的信號包含幅段、頻率和相位分量,所以用向量表示很實用。簡單而言,在一個測量系統中用向量來表示這些信號也很實用。
測量挑戰
MIMO技術在數據吞吐量上的提高,增加了系統復雜性,為評估MIMO系統和系統中元器件的測試和測量設備帶來新的設計挑戰。在決定最佳的MIMO測量儀器之前,也許有必要先確定一個描述MIMO通信信道性能的測量類型。MIMO測量一般可以分為系統級測量、信道響應測量和MIMO 系統中使用的元器件的功能性測量。
已經說明了MIMO信號由頻率、幅度和相應的相位分量定義,對MIMO信號的測量必須對以上三個信號特征分量進行精確和真實的測定。另外 MIMO系統通常是基于對接收信號進行零中頻(zero-IF)下變頻到基帶I、Q信號分量的系統。要得到高的調制精度,必須保持I、Q信號分量的保真度,這需要信號路徑所有的部件具有高性能和低失真,包括放大器、濾波器、混頻器、I/Q調制和解調器等部件。
在許多無線系統中,誤差向量幅度(EVM)是評估性能的標準參數,并在MIMO系統中廣泛采用。EVM,通常被認為是接收信號星座圖的誤差 (RCE),因為在星座圖中RCE得到了直觀的顯示,RCE實際上就是理想信號和測量信號的向量差,并可以作為MIMO發射機調制精度和信號質量和接收機性能的直接測量。EVM測量捕獲了信號幅度和相位誤差并將定義傳輸的RF信號失真的許多參數減少到一個參數,允許各個發射機之間的比較。其他重要的 MIMO發射機測試包括群延時的評估和群延時的變化,相位噪聲,放大壓縮和信號處理中分量的I/Q失配。由以上因素引起的信號失真一般都可以通過星座圖上的EVM看出來。
在星座圖EVM中,對于理想的信號,所有星座點應該與理想的位置精確重合。但信號和分量并不完美,諸如相位噪聲和載波泄露等因素會讓星座圖上的星座點從理想位置偏移。EVM即是這個偏移的測量,除了整體EVM作為MIMO系統測試參數,EVM作為頻率和EVM作為時間功能也能提供MIMO發射機性能的分析。另外,EVM顯示的載波和符號的對比可以提供MIMO發射機性能的進一步細節。
星座圖EVM上精確的點的定位顯示了一個優秀的MIMO系統的性能。在一個采用OFDM和64QAM的2×2 MIMO系統中,采用顏色來區別不同的發射機信號和導頻載波。在圖3所示的星座圖中,紅點和藍點表示了2×2 MIMO系統中的兩路信號,Tx0和Tx1,它們覆蓋在白點上,白點代表了子載波理想的位置。黃點代表了導頻載波,與表示理想導頻載波的白點重合。

圖3 EVM星座圖提供潛在MIMO系統問題的示意圖,這些問題包括噪聲(模糊的圓點),I/O不平衡(偏移的圓點)和相位噪聲(圓點變成了圓環)
這樣的顏色定義的圖表讓發射信號問題的定位十分簡單。例如,紅色或藍色的子載波星座點如果從理想的白色點偏移就表示I/Q不平衡,而星座點出現模糊則表示傳輸信號有噪聲,星座點呈現圓環狀則意味著過多的相位噪聲。
與更為常見的X-Y坐標圖一起,信道的一系列測量顯示了MIMO系統中相對子載波的標圖矩陣和信號矩陣的健康程度。圖4中對信道翻轉和符號傳輸的系統能力的測量,可以用來確定MIMO系統中各個信號流的正交性。通過傳輸反轉的符號,系統的覆蓋性可以得到分析,通過傳輸并行的符號,系統吞吐量可以得到評估。
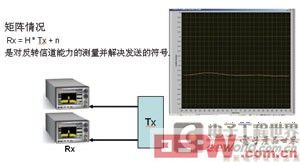
圖4 X-Y圖示表明了MIMO信道子載波的正交性,標示了子載波的情況



評論