一種基于H.2 6 4標準的快速運動估計算法

2 運動估計的閾值確定
視頻圖像的運動矢量大部分為零矢量或運動很小的矢量。運動矢量為零的塊稱為靜止塊;運動矢量很小的塊(以搜索窗口中心為圓心,兩像素為半徑的圓內)稱為準靜止塊:而其他的稱為運動塊。如果有超過80%運動矢量很小的塊可被看作靜止或準靜止塊。因此,可設一個閥值T,當運動矢量的值小于T時,可用SDCSP搜索法直接進行精確定位,找出最優點;當運動矢量的值大于T時,可用LDCSP搜索算法找出最優點。
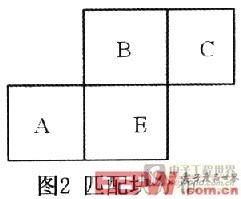
運動矢量空間域的預測方式有運動矢量中值預測、空間域的上層塊模式運動矢量;在時間域的預測方式有前幀對應塊運動矢量預測和時間域的鄰近參考幀運動矢量預測。本文采用運動矢量中值預測方式。根據與當前E塊相鄰的左邊A塊,上邊B塊和右上邊C塊的運動矢量,取中值作為當前塊的預測運動矢量。如圖2所示。
設當前要編碼塊E的運動矢量為MVp。如果運動矢量的值MVp≥T,則與E塊相鄰的各塊間運動的相關性較高,表明該區域的變化比較平緩;如果運動矢量的值MVpT,則與E塊相鄰的各塊間運動的相關性較低,表明該區域變化比較劇烈。通過對missa、grandmother、carphone、salesman的檢測可知,取閾值T=2。
3 自適應運動估計算法
結合上述DCS算法和閾值的確定,可采取先對視頻圖像的運動塊進行閾值的判斷,再根據判斷結果進行最佳匹配塊的搜索。具體搜索步驟描述如下:
Step 1:判斷當前塊運動矢量MVp和閾值確大小。若MVp≥T,則進入Step 2;若MVpT,則進入Step 5。
Step 2:用LDCSP在搜索區域中心及周圍8個點進行匹配運算,然后判斷,找出MBD點。若MBD點位于中心點,說明宏塊是靜止的,DCS算法一步結束,得到最優匹配塊;否則進行Step 3。
Step 3:若MBD點為LDCSP模版的小十字處,以該點為中心構建SDCSP進行匹配計算,若MBD點位于中心點,所得MBD點為所求。否則,進入Step 4。
Step 4:若MBD點為LDCSP模版的大十字處,以該點為中心構建LCSP進行匹配計算,進入step 2。
Step 5:用LDCSP在搜索區域中心及周圍5個點進行匹配運算,然后判斷,找出MBD點。若MBD點位于中心點,所得MBD點為所求;否則繼續Step 5。
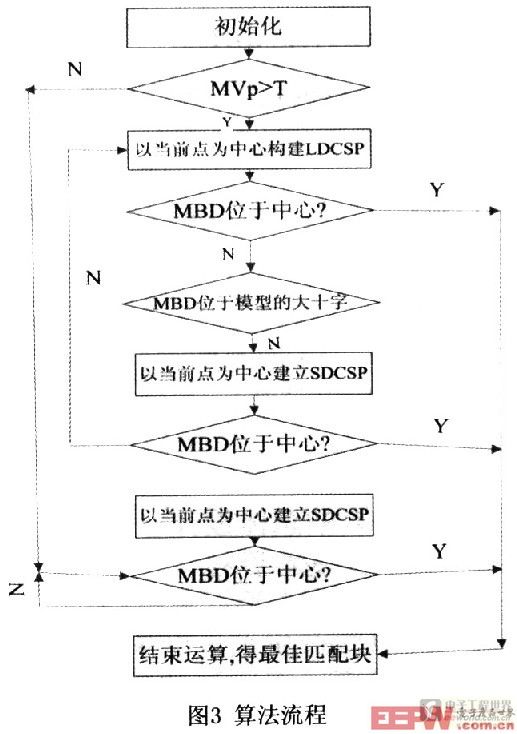
算法流程圖如圖3所示



評論