一種基于Cotex-M3內核的智能低壓斷路器控制器設計

電流信號變換電路是將過載、短路故障電流信號通過霍爾傳感器ACS712ELCTR-30A-T將交流電流信號變換成按正弦變化的直流電壓信號,其傳遞函數為:
本文引用地址:http://www.104case.com/article/249569.htmuout=66(mV/A)*ip(A)+2.5(V) (1)
其中:uout為霍爾傳感器的輸出電壓信號,ip為霍爾傳感器的輸入電流信號。
有源低通濾波器采用集成運算放大器LM358組成的二階直流耦合低通RC有源濾波器,將霍爾傳感器輸出的電壓信號中中頻及高頻干擾信號濾除,有源低通濾波器的截止頻率:
品質因數Q=0.5,閉環增益Av=1。
波形變換電路采用電壓比較器LM339所構成的雙限比較器電路,其中兩個電壓比較器的比較值由微控制器D/A功能設置,分別連接D/A1和D/A2端口,當被測信號電壓變化范圍在設定閾值內(UD/A1
光電耦合器電路采用TLP521-1組成,其功能:一是將進一步的濾除干擾信號,增加硬件系統的可靠性;二是實現把5V邏輯電平轉換成3.3V邏輯電平,與微控制器的邏輯電平兼容。
2 智能低壓斷路器控制器軟件設計
2.1 過載、短路故障算法——微分法原理
智能斷路器控制器完成電網中一次回路現場參數的實時采集、實時顯示、實時保護、實時通信等任務,屬于多任務實時系統。在這些任務中最重要的是實時保護,包括對過載、短路等故障的保護。對于斷路器,當電網中一次回路出現過載、短路故障時,要求立刻可靠的分斷,切斷故障源,避免故障范圍擴大,并且根據現場實際情況,斷路器可以選擇重合,重合次數一般0~5次,取值越大,重合越難。為了可靠而又快速地分斷,本智能控制器故障電流采樣算法采用“微分法”,即故障電流的變化率di/dt,變化率越大,故障越嚴重。
在三相交流電中電流信號i表達式為:
i=Imsin(ωt+φo)(A) (2)
其中:Im為電流幅值,ω為角頻率,t為采樣時間,φo為初始相位角。
在三相交流電中,已知角頻率ω=2πf=2×3.14×50=314(rad/s),采樣時間t單位為ms,采用國際單位制,則ωt=0.314t(rad)。初始相位角φo=0。所以,式(2)可寫成:
i=Imsin(0.314t)(A) (3)
所以電流的變化率為:
霍爾傳感器的輸出電壓信號由式(1)、(3)得:
uout=0.066×Imsin(0.3140+2.5(V) (5)
然后再通過分壓電阻限制uout的最大值為3.3V,因為雙限比較器的比較值UD/A1和UD/A2由微控制器的D/A功能提供,輸出的最大值為3.3V。所以,波形變換電路的輸入信號為:
u=0.73uout=0.04818×Imsin(0.314t)+1.83(V) (6)
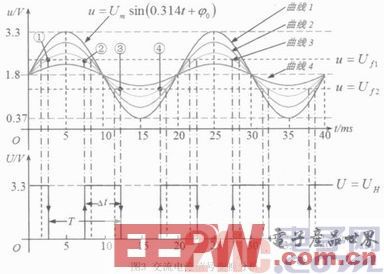
其中:u值為通過微控制器內集成的D/A功能設置的比較電壓值,t值通過微控制器內集成的PWM輸入捕獲功能測量得到。如圖3交流電流信號變換分析,當上限u=Uf1或下限u=Uf2時,對于曲線4沒有超出雙限范圍,所以沒有突變點。而曲線1、曲線2、曲線3都不同程度地超出雙限范圍,所以都有突變點。以曲線3為例說明,在圖中①、②、③、④為突變點,對應雙限比較器輸出為PWM方波信號。在圖3中PWM方波信號的周期為T=10ms,正脈寬時間為△t可以通過微控制器的PWM輸入捕獲功能得到,當Uf1和Uf2的值關于u=1.8V軸對稱時,則對于圖中①突變點的坐標值
,②突變點的坐標值
,③突變點的坐標值
,④突變點的坐標值
。把①突變點的坐標值代入式(6)中,求出電流幅值:
由式(4)、(7)得,故障電流的變化率為:
其中,Uf1是一個定值,所以式(8)的性態取決于cot(0.314t)的性態,t取圖3中正弦信號的1/4周期內變化,t值越小,cot(0.314t)值越大,di/dt值就越大。
2.2 過載、短路故障程序設計
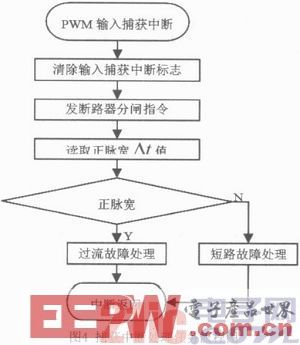
智能斷路器控制器既要完成故障采樣、處理等實時任務,也要完成顯示、鍵盤掃描、通信等實時任務。文章只對過載、短路故障的采樣、處理進行分析,由微控制器中集成的PWM輸入捕獲中斷完成。采用這種設計方案的好處是PWM輸入捕獲中斷源向CPU發送中斷申請,是在環網一次回路中出現異常情況下產生的,正常情況下輸入捕獲中斷不產生,大大優化了CPU的效率,能快速、實時地跟蹤和響應故障電流信號的躍變點。捕獲中斷處理任務流程圖如圖4所示。

低通濾波器相關文章:低通濾波器原理
斷路器相關文章:斷路器原理
高壓真空斷路器相關文章:高壓真空斷路器原理 漏電斷路器相關文章:漏電斷路器原理








評論