基于MC9S12XEP100的旋轉磁場定向測距系統設計
——

編者按:摘要:針對傳統基于地磁導向的連續測斜系統易受干擾以及慣性導航的陀螺測斜系統具有積分漂移誤差,難以滿足連通井導向定位高精度測量的需求,提出一種基于旋轉磁場閉環定向測距的系統方案,完成了該系統的硬件電路設計、軟件設計以及遠距離通訊協議設計,并進行了地面實驗。該測距系統由地面系統和井下系統組成;其中,井下系統用于數據的采集、地面系統用于數據接收和命令傳輸,系統之間數據采用曼切斯特碼傳輸以提高精度降低誤碼率。
旋轉磁場導向測距的理論基礎是
本文引用地址:http://www.104case.com/article/248895.htm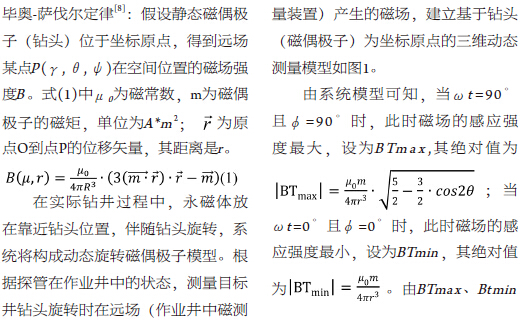
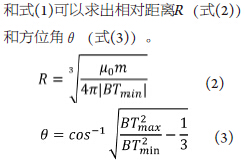
2 硬件電路設計
系統硬件由井下測量系統和地面通信系統組成,其設計框圖如圖2所示。上位機(PC)通過串口發送命令給地面通信系統;地面通信系統接收到命令后,通過1553通訊協議將接收到的命令轉發到井下測量系統;井下測量系統接收到地面通信系統,按照通訊協議進行相應處理,處理完成后返回相應數據包至地面通訊系統。正常工作采用1553協議通訊,地面通信系統和井下測量系統以曼徹斯特碼進行數據傳輸;調試時采樣串口通信協議。地面通信系統接收完井下傳輸的數據,將其轉發給上位機PC處理。
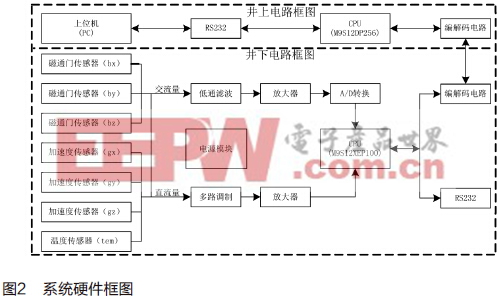
2.1 井上系統
井上系統在上位機和井下測量系統中起承上啟下的作用。一方面用于轉發上位機命令;另一方面用于接收井下數據并進行解碼操作。其電路包括以MC9S12XEP100為核心的單片機最小系統和以HD6408為核心的編解碼電路、信號加載和解調電路。其中,編碼信號加載至總線以及從總線上解調出曼徹斯特碼的電路如圖3所示。虛線左邊的電路用于將HD6408編解碼芯片產生的編碼信號BZO加載至總線LINE;右邊電路由兩個帶通濾波器組成,用于從總線LINE上解調出曼切斯特碼信號UDI,送入HD6408進行解碼操作。如圖3所示。
2.2 井下測量系統
井下測量電路包括:電源模塊、測量模塊、信號調理電路、A/D轉換、通信電路。電源模塊采用24V直流電壓輸入,經過LP2951穩壓和濾波后得到15V、12V和5V;測量模塊包括磁場、重力加速度和溫度信號的測量;信號調理電路將測量的信號進行濾波和放大處理,降低噪聲干擾;A/D模塊采用24位高精度芯片AD7734將濾波放大后的數據進行模數轉換;通信電路主要包括RS232(調試)和1553通信。







評論