一種基于線性CCD的直立小車循跡行駛設(shè)計

右輪速度控制量=設(shè)定值-(速度控制量測量值+轉(zhuǎn)向控制量測量值)
本文引用地址:http://www.104case.com/article/248145.htm則實際上,轉(zhuǎn)向控制量為速度控制閉環(huán)中一部分,在C語言實現(xiàn)時,將兩控制量由同一控制算法計算。最終輸出量為:
電機輸出量=直立控制量+速度與轉(zhuǎn)向控制量
由原理可知,在直道上行駛時,因為轉(zhuǎn)向控制量接近于零,所以傳統(tǒng)速度控制與我們所使用雙速度控制下的速度輸出量相同。轉(zhuǎn)向時,由于圖像采集后的PID控制產(chǎn)生轉(zhuǎn)彎控制量,形成左右輪差速,實現(xiàn)車模轉(zhuǎn)彎。傳統(tǒng)速度控制模式下轉(zhuǎn)彎控制量并不受速度控制調(diào)整,轉(zhuǎn)彎量相對速度控制參數(shù)來說是一種擾動量,在雙速度控制算法下,轉(zhuǎn)彎量因?qū)Ξ?dāng)前輪胎轉(zhuǎn)速造成影響,故受到該輪速度控制調(diào)節(jié)。雙速度控制下,當(dāng)車模運行轉(zhuǎn)彎時,雙速度控制實際上會減緩車模入彎控制速度,加快車模出彎控制速度。實驗效果上,因雙速度控制減緩車模入彎控制量,則在很大程度上減小了車模因快速入彎而造成的側(cè)滑以及側(cè)翻,而對于出彎的快速調(diào)整,使車模可以在出彎后更快地調(diào)整車模位置,便于處理連續(xù)彎道及出彎后的障礙、虛線、起跑線等特殊賽道情況。因此,雙速度控制下,轉(zhuǎn)彎時速度控制量不為零,相當(dāng)于系統(tǒng)轉(zhuǎn)彎時始終有速度閉環(huán)存在,輪子的左右差速由速度閉環(huán)控制。
3 實驗數(shù)據(jù)
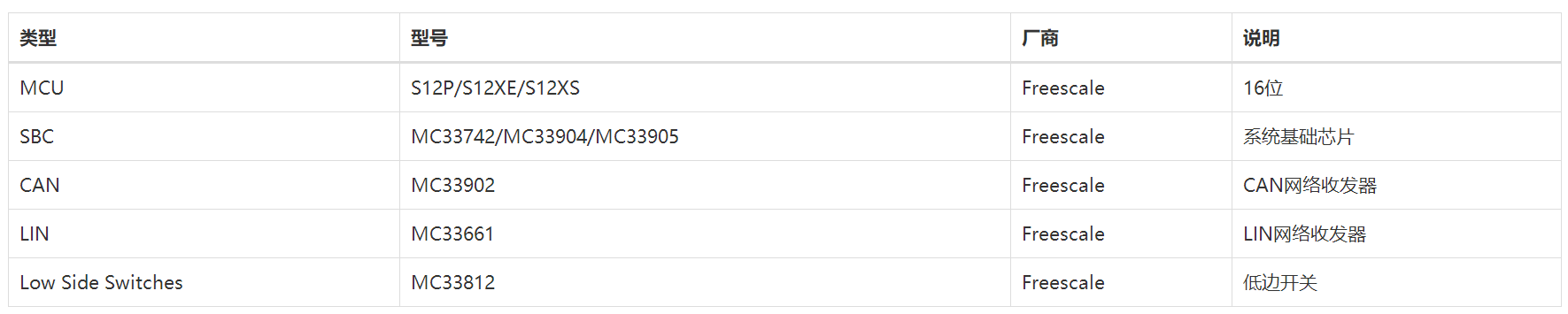
以下為各種不同道路情況下,測得系統(tǒng)在不同路況下所能通過的最短時間,由光電門測量計時,如表1所列。

由以上數(shù)據(jù)可以看出,在彎道越多時,雙速度控制所帶來的速度提升越明顯,而在連續(xù)小S彎道時所帶來的提升不大。
在本屆智能車競賽中,對光電平衡車來說,對于速度提升最大的考驗是本屆智能車首次加入的障礙部分。障礙部分最大的難點在于,車模直立狀態(tài)經(jīng)過障礙時,不可預(yù)測是車模的左輪還是右輪先經(jīng)過障礙。在車模高速行駛經(jīng)過障礙時,會出現(xiàn)車模騰空、車模電機失速的現(xiàn)象。當(dāng)電機失速時,車模落地時左右輪哪一個先落地同樣不可控,由此車模回歸地面速度不可控,造成車模倒地或側(cè)翻。
雙速度控制在很大程度上可以減小車模在過障礙時的失速。當(dāng)車模經(jīng)過障礙時,無論是左輪還是右輪先經(jīng)過障礙,車輪失速、雙速度控制下,雙電機的速度控制是獨立的,又由于對電機的控制采用調(diào)節(jié)速度很快的PD控制,可以控制電機在失速回歸地面后迅速調(diào)整車身姿態(tài),在車身重心較低情況下,高速通過單個障礙。經(jīng)反復(fù)試驗,PD控制下的雙速度控制可以很好地克服車模過障礙時對車模產(chǎn)生的影響,效果很好。
結(jié)語
本屆競賽,組委會首次要求光電組直立,本設(shè)計基于飛思卡爾K10芯片,首次嘗試使用線性CCD作為圖像處理傳感器。根據(jù)線性CCD所采圖像,通過PID控制原理,采用雙速度控制算法對高度復(fù)雜的不同路況、障礙等情況都實現(xiàn)較好處理,效果良好。

pid控制相關(guān)文章:pid控制原理
pid控制器相關(guān)文章:pid控制器原理
電荷放大器相關(guān)文章:電荷放大器原理 網(wǎng)線測試儀相關(guān)文章:網(wǎng)線測試儀原理 激光二極管相關(guān)文章:激光二極管原理













評論