S7-200在全液壓輪胎壓路機控制中的應用

0 概 述
在現代各類建筑基礎、路面和路基的壓實中,輪胎壓路機具有不可代替的優越性,其充氣輪胎除有垂直壓實力外,還有水平壓實力,這些力的作用加上膠輪彈性所產生的一種“揉搓作用”結果就產生了極好的壓實效果。同時,輪胎間的相互重疊能產生平整、致密的表面質量。而傳統的以機械式傳動為主的輪胎壓路機因其結構笨重、機械換檔在機群式作業、頻繁換向工作中顯得力不從心,無法滿足現代自動控制、遠程監控的要求,其操作的安全性、舒適性也因此受到局限。
三一重工2005年推出的新型YL
1 控制系統結構及控制原理
YL
② Rt=U/I
將①、②式歸并可得出公式③
③ T=τlnk/U 其中k=K·I
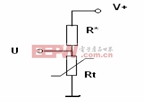
圖2
式中:T為傳感器檢測的溫度;Rt為傳感器電阻;τ和K為常數(可以事先利用溫度計和萬用表測出兩組T、U值求出)。
將電壓信號送入PLC模塊(模擬量輸入點),經A/D轉換及相關函數運算、標定,利用公式③即可計算出對應的傳感器檢測的溫度值。
2 控制系統硬件
2.1控制器
由西門子S7-200主模塊CPU224及擴展模塊EM223、EM235組成。其中CPU224為西門子小型PLC主模塊,設計緊湊、良好擴展性及強大的指令可以近乎完美滿足小規模控制要求,EM223為4DI/4DO數字量擴展模塊,EM235為4AI/1AO模擬量擴展模塊。
(1) 18路數字量輸入14路數字量輸出,4路模擬量輸入1路模擬量輸出
(2) 工作電壓20.4~28.8VDC,工作環境溫度0~
(3) 高速計數輸入點響應頻率20 kHz,邏輯1電平15~30 VDC;
(4) 高速脈沖輸出頻率20 kHz,輸出驅動電流750 mA;
2.2顯示器
西門子文本顯示器OP73Micro,可顯示3行每行達12字中文信息,4功能鍵/7系統鍵,前面板尺寸148×
2.3測速傳感器
REXROTH霍爾轉速傳感器HDK18,工作電壓8~36V;
2.4行駛手柄
選用帶行程開關及中位鎖GESSMAN產的工程機械專用行駛手柄S
(1) 手柄機械運動角度±37.5°;
(2) 壽命> 1000 萬次,工作環境溫度-40~
(3) 電阻及功率2×5 kΩ/1.5 W。
2.5比例放大器
工作電壓18~32 V,輸入電壓0~5 VDC, PWM輸出電流
3 控制程序設計
程序編制采用模塊化結構,包括主程序、子程序和中斷程序等。主程序主要完成程序初始化、輸入點濾波、系統報警信號處理、行走及制動控制和實現各子程序的調用等核心功能。子程序主要實現記錄機器連續工作時間并保存在永久存儲器中、高速計數器和高速脈沖發生器程序初始化、速度PID調節和發動機轉速控制。中斷程序則用來通過定時中斷完成發動機轉速及行走速度信號的采集,計算出相應的轉速值及速度值。
高速計數:本產品設計應用了兩路高速計數,一路是發動機轉速檢測,另一路是行走速度檢測。通過安裝在發動機或行走馬達飛輪殼體上的傳感器可以接受電磁脈沖信號,每一個飛輪齒經過傳感器時,傳感器即輸出一個波形,設該波形的頻率為f,飛輪齒數為Z,發動機或馬達轉速為n,則它們滿足以下公式:
④ n=f*60/Z(單位RPM)
PLC高速計數是采用定時中斷的方式累計單位時間里(如100mS)所采集的脈沖數,那么所累計1秒時間所采集的脈沖數就是我們要知道的頻率f,而飛輪齒數Z也已知,利用公式④就可以計算出發動機的轉速n了。
在測得行走馬達轉速n后,已知減速機減速比為i,輪胎直徑為D,則利用公式⑤就可以計算出機器行走速度v了:
⑤v=n* *D/i(單位m/min)
PWM功能:PWM功能在工程機械中具有廣泛的應用,如直流電機調速,電磁閥流量或壓力調節等。而本產品則應用于行走主泵流量控制的比例電磁閥,該電磁閥對驅動電流要求是一個振顫信號,響應頻率為100~200Hz,且線性好,重復精度高。而PWM功能提供的是占空比線性可調的脈沖輸出,最高頻率可達20kHz,占空比可在0%~100%自由調整,設占空比為τ,PLC輸出PWM波的電壓為U,電流為I,電磁閥的電阻為R,則它們滿足以下公式:
⑥ I=U* /R
因此,通過調整占空比τ,就可以比例控制電磁閥的驅動電流了,間而達到調速的目的。
文本顯示器OP73Micro需要采用組態軟件SIMATIC WinCCflexible進行編程。是基于Windows2000/XP的應用軟件,支持中文字符和位圖文件,編程界面友好,提供在線幫助功能,支持剪切/復制及粘帖等編輯功能,只是對編程電腦硬件配置要求較高。
軟件主程序及調速子程序結構流程圖見圖3和圖4所示。
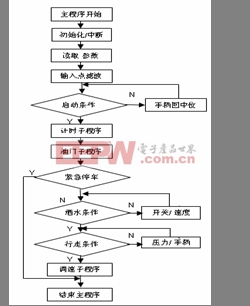
圖3 主程序流程

圖4 調速子程序流程圖

















評論