基于LS-SVM非線性內模控制在焊縫跟蹤中的運用

焊接過程中,由于工件的加工誤差、熱變形、定位誤差等各種因素的影響,經常使焊槍偏離焊縫中心,導致焊接質量下降。為保證焊接的可靠性,必須實時檢測焊縫的位置,使焊槍始終對準焊縫中心,進行焊縫的自動跟蹤。由于焊接是一個非常復雜的過程,各種時變、非線性、多耦合的影響因素很多,很難甚至不可能建立跟蹤過程的精確數學模型。即使采用經典控制理論和現代控制理論方法,系統的性能也不能令人滿意。
內模控制具有調節性能好、魯棒性強以及能消除不可測干擾的影響等特點,但內模控制的穩定性與控制效果取決于模型與被控過程的匹配情況[1-2]。通過樣本數據建立系統固定的逆模型,與系統串聯成精確的偽線性系統,對偽線性系統采用魯棒性強的內模控制,對非線性系統具有較好的控制效果。
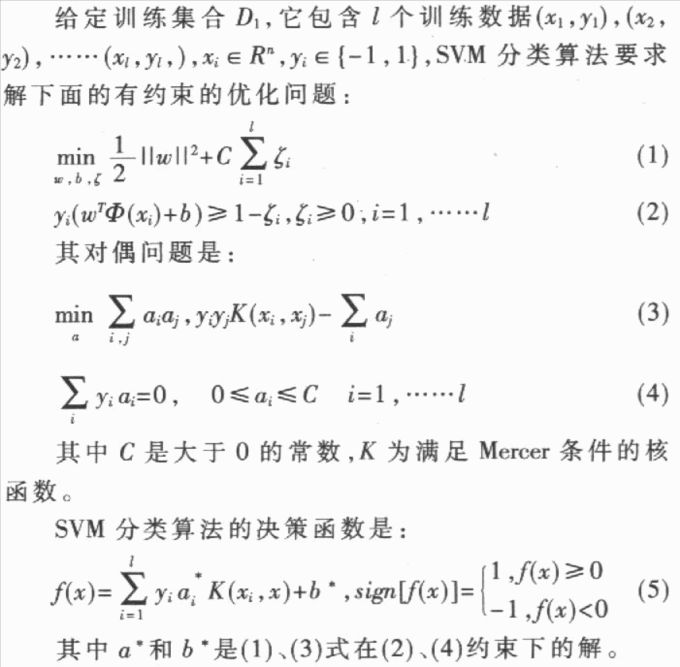
LS-SVM是基于SVM的一種改進算法[3-5],它是SVM在二次損失函數下的一種形式,用二次損失函數取代SVM中的不敏感損失函數,通過構造損失函數將原SVM中算法的二次尋優變為求解線性方程,簡化了計算的復雜性。
本文將LS-SVM用于系統的逆建模,提出了一種新的用于水下機器人焊接焊縫跟蹤的基于LS-SVM非線性內模控制算法,實現了快速響應和平滑過渡。
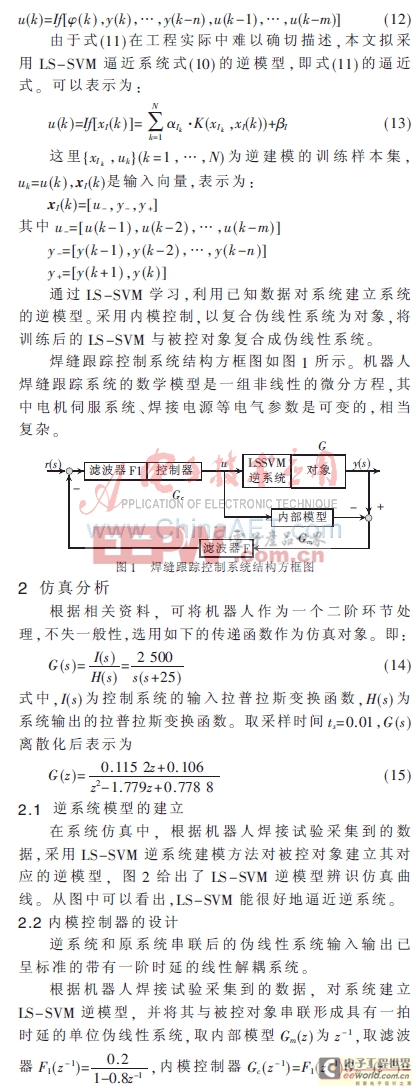
zF1(z-1),確保內模控制器Gc(z-1)正則。F(z-1)被選為常矩陣,F(z-1)=1。
仿真結果如圖3所示,基于LS-SVM非線性內模控制器對噪聲的抗干擾能力較好。
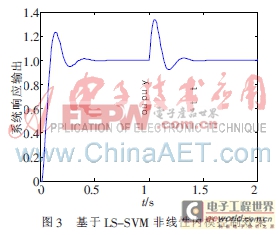
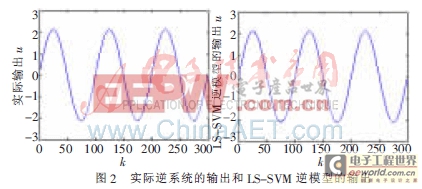
由仿真結果可以看出本文所提出的方法發生常值攝動和受到常值的強干擾的情況下,均有很好的跟蹤效果。
針對機器人焊縫跟蹤系統的典型非線性系統,提出了一種新的控制基于LS-SVM非線性內模控制算法。仿真結果表明,該方法控制精度高、速度快、魯棒性好,控制器能很好地實現焊縫跟蹤。本文所提方法針對一般的非線性系統,且物理概念清晰,適用面廣,便于工程應用。
參考文獻
[1] 周涌,陳慶偉,胡維禮,內模控制研究的新發展[J].控制理論與應用,2004,21(3):475-482.
[2] 趙噯.論兩種改進內模控制系統的等價性[J].控制與決策,2007,22(10):1170-1176.
[3] SUYKENS J A K, VANDEWALLE J. Least squares support vector machine classifiers[J]. Neural Processing letters. 1999,9(3):293-300.
[4] SUYKENS J A K, VANDEWALLE J. Multiclass least squares support vector machines[C]. IJCNN’99 International Joint Conference on Neural Networks. Washington DC. 1999.
[5] CORTES C, VAPNIK V. Support vector networks[J]. Machine Learning, 1995,20:273-297.


評論