基于ARM的紅外光汽車速度管理系統(tǒng)研究

2.2 信號(hào)接收與定時(shí)器工作
如圖3 所示,在沒(méi)有車輛經(jīng)過(guò)光控測(cè)速區(qū)時(shí),M’、N’兩點(diǎn)一直能接收到38KHz 的調(diào)制紅外光,均輸出高電平,暫穩(wěn)態(tài)電路均處在穩(wěn)態(tài)。門(mén)G 的輸出為邏輯1,UL 始終為高電平。當(dāng)有車輛通過(guò)光控測(cè)速區(qū)時(shí),M 點(diǎn)發(fā)出的光線首先被阻斷,UM 由高電平先變?yōu)榈碗娖剑瑫悍€(wěn)態(tài)電路1 被觸發(fā)而進(jìn)入暫穩(wěn)態(tài),如圖4 中的t1 時(shí)刻之后所示。此時(shí),UM’為低電平,G 門(mén)觸發(fā),輸出UL 為低電平。ARM 系統(tǒng)的CAP1.0 捕獲到UL 由高電平變低電平,發(fā)生下降沿捕獲,自動(dòng)裝載T1TC 的值傳輸?shù)讲东@寄存器T1CR,并產(chǎn)生中斷,進(jìn)入中斷服務(wù)子程序,讀取T1CR 的值而保存。

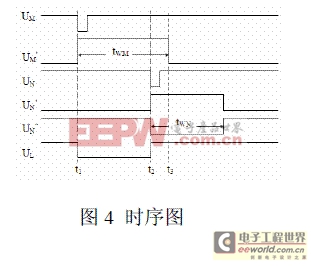
隨后,當(dāng)汽車達(dá)到N 點(diǎn)時(shí)——即在t2 時(shí)刻,暫穩(wěn)態(tài)電路2 被觸發(fā),UN’變?yōu)楦唠娖剑?jīng)過(guò)非門(mén)變?yōu)榈碗娖経N’’。此時(shí)G 門(mén)輸出由低電平變?yōu)楦唠娖剑?a class="contentlabel" href="http://www.104case.com/news/listbylabel/label/ARM">ARM 的CAP1.0 捕獲到UL由低電平變高電平,發(fā)生上升沿捕獲,自動(dòng)裝載T1TC 的值到捕獲寄存器T1CR,并產(chǎn)生中斷,進(jìn)入中斷服務(wù)子程序。計(jì)算兩次捕獲寄存器T1CR 的差值N 及計(jì)數(shù)器的工作頻率f,得到車輛通過(guò)兩測(cè)試點(diǎn)M 點(diǎn)和N 點(diǎn)的時(shí)間差t2-t1。
2.3 ARM 核心板及觸摸顯示系統(tǒng)









評(píng)論