2.4G射頻的CAN總線汽車故障診斷儀設計

在當今的中高檔汽車中,都采用了CAN總線技術。針對車載CAN總線會出現的故障.結合射頻和USB的優點,依靠KWP2000應用層規定的故障代碼,本文提出了一種基于車載CAN總線故障診斷儀設計方案。本方案成本低廉,攜帶方便,具有很強的靈活性與適應性。
1 方案設計
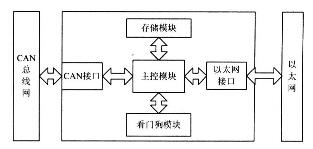
系統總體設計框圖如圖l所示。系統分為發射端和接收端兩部分。
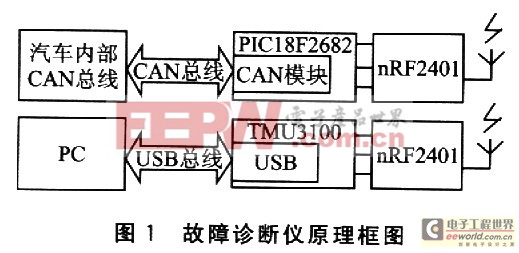
由于采用射頻技術,使汽車CAN總線數據采集部分和CAN總線數據診斷部分得以分離,無需連線,不受空間場地限制,安裝攜帶方便。按照ISO有關標準, CAN總線傳輸速率最高可達1 Mbps;但由于汽車內部特殊環境,車載CAN總線速率一般在250 kbps。本系統中射頻速率最高可達l Mbps,可以很好地滿足數據傳輸要求。
發射端采用USB作為接收模塊和PC接口。USB與RS232或PCI接口相比,具有用戶使用方便,設備自動識別,自
PC端應用層軟件整合KWP2000的應用層協議。KWP2000是由瑞典制定的一種車載故障診斷協議,已在微機控制的自動變速器、防抱死制動系統、安全氣囊、巡航系統中得到廣泛應用。它基于OSI七層協議,符合IS07498標準。其中第1~6層實現通信服務的功能,第7層實現診斷服務的功能。其應用層提出了一套完整和標準化的診斷代碼,本系統利用KWP2000的應用層協議,對采集到的CAN總線數據進行分析,以實現故障診斷的功能。
2 硬件實現
2.1 系統所用芯片簡介
2.1.1 n
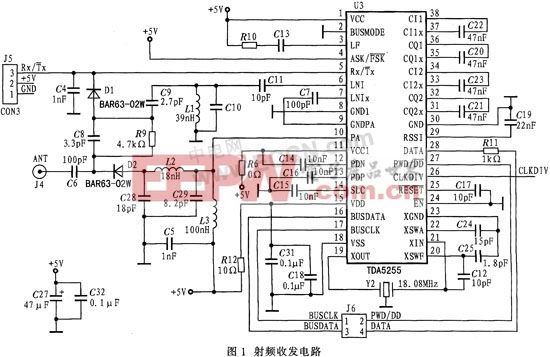
nRF240l 是單片射頻收發芯片,工作在2.4~2.5GHz ISM頻段;內置頻率合成器、功率
nRF240l有4種工作模式:收發模式、配置模式、空閑模式、關機模式。其工作模式由PWR_UP、CE、CS三個引腳和配置字節最低位TX_EN來決定。
收發模式分為DirectMode和ShockBurst。前者在片內對信號不加任何處理,與其他射頻收發器相同。后者使用片內FIFO堆棧,數據從 MCU低速送入,但高速發射,而且與射頻協議相關的所有高速信號處理都在片內進行。例如,nRF240l在ShockBurst收發模式下自動處理字頭和 CRC校驗碼,在接收時自動把包頭和CRC校驗碼移去;在發送數據時自動加上字頭和CRC校驗碼。
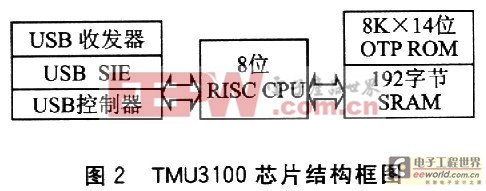
2.1.2 TMU3100芯片
TMU3100是臺灣Tenx公司2005年推出的RISC內核的單片機。它嵌入了完全兼容USBl.1協議的USB控制器,并且提供了低速USB接口和3個端點,其中1個控制輸入/輸出端點和2個中斷輸入端點。
TMU3100可以配置為標準的HID類,可以使用Windows
2.1.3 PICl8F2682芯片
PICl8F2682是Microchip公司新推出的8位低功耗CAN微控制器,主要資源有:內置標準CAN模組、80KB閃存程序存儲器、1 KB數據E2PROM、3.3 KBRAM存儲器、8通道
PIC18F2682內置增強型的CAN總線模塊,該模塊包含CAN協議引擎、信息緩沖和信息控制。CAN協議引擎自動處理CAN總線上所有接收和發送的消息,它可以在接收或發送信息時對數據幀進行解析。只需要首先設置適當的寄存器就可以發送信息,通過相關的寄存器即可得到信息傳輸的狀態。
2.2 硬件電路
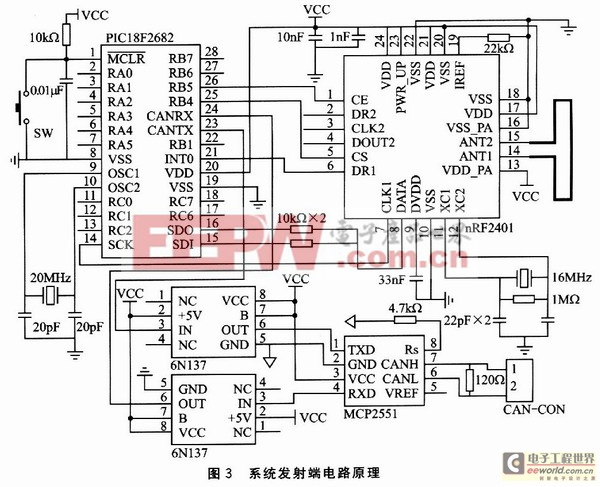
2.2.1 發射端電路原理
圖3是系統發射端電路原理。CAN總線接口使用Microchip公司內置CAN模塊的PIC18F2682單片機,并由光耦6N137進行總線隔離;CAN總線收發器采用MCP2551。


評論