基于Atmel半導體方案的汽車雨刷系統的設計實現

ECU消耗電流要低這一要求的重要性不斷增長。為能夠保證待用IC的靜態電流低,要采用專用喚醒和休眠模式。雨刷器應用的典型功能劃分見圖4示,由微控制器、微控制器供電穩壓器以及其他如霍爾傳感器的分立元件組成。為安全起見,例如在雨中駕駛時,雨刷器損壞可能就很危險,這就要求系統有一看門狗。
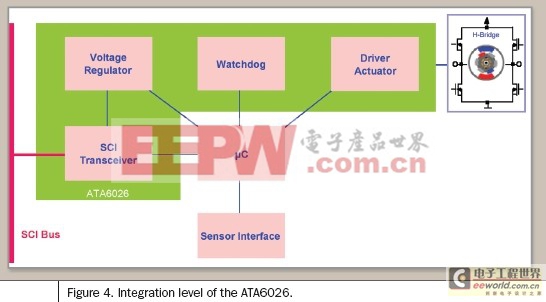
為進一步防止系統出現故障,要求汽車IC具備很多功能,如過熱關閉、過壓和欠壓保護、以及防短路全保護,要滿足嚴格的汽車鑒定要求(防傳導干擾,EMC和ESD保護)。為解決這些問題,滿足以上要求,Atmel公司開發了ATA6026這一高度集成的柵極驅動器IC。該柵極驅動器IC包括一個5V/100mA穩壓器加一個看門狗,對要求PCB面積較小的較小型設計,這就減少了外部元件數,這在機電方案中很關鍵。該IC進行運動控制,因此這一功能不需要在微控制器中增加任何存儲器。看門狗執行窗口看門狗的功能,在窗口打開期間,由微控制器通過WD引腳從低電平向高電平轉化時觸發。如果看門狗檢測到窗口錯誤,即在窗口打開時未觸發或者在窗口關閉時錯誤觸發,將會產生復位脈沖。
圖5中的框圖給出了要實現的功能和典型應用的原理圖。微控制器通過提供一PWM速度信號和一方向信號來控制IC的驅動功能。因為該芯片必須驅動外部H橋的柵極,所以包含有兩個推挽式驅動器,用來控制兩個用作高端驅動器的外部功率NMOS FET,另外還有兩個推挽式驅動器,用來控制兩個用作低端驅動器的外部功率NMOS FET。驅動器可與標準或邏輯電平功率NMOS FET一起使用。高端控制驅動器使用外部自舉電容器給柵極提供超過電池電壓8V~14V的電壓。也可以逆向控制電機。采用電荷泵給高端驅動器的柵極供電,這樣在兩個方向上都可能達到100%的占空比。為防止H橋出現高峰值電流,采用非重疊相位實現外部功率NMOS晶體管的切換。交叉導通時間由外部RC組合決定。
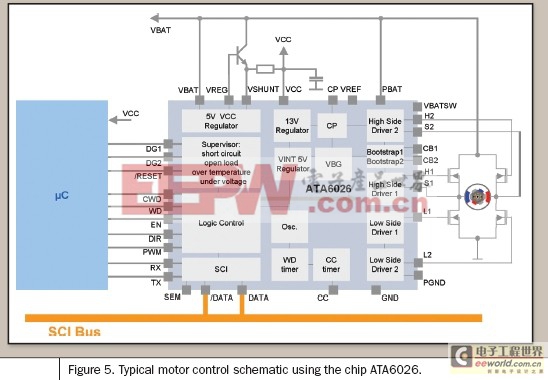
內部和外部電壓源采用低功率和低壓降片上穩壓器。一個用作功率元件的外部晶體管有助于降低功耗。在待用期間,器件的休眠模式能保證靜態電流很低,通常為35微安。對于6V~9V的電池電壓,穩壓輸出為5V ± 10%;電池電壓超過9V時,穩壓輸出為5V ± 3%。為防止外部NPN管和IC的損壞,用一感測電阻檢測穩壓器輸出電流。萬一出現過電流,穩壓器就將電流限制到指定的水平。也就是說,如果穩壓器特性變為穩流器特性,則輸出電壓將擊穿。即使出現永久的導通狀態(100% PWM,自舉功能不存在了),全集成充電泵仍能給高端驅動器的外部功率MOSFET的柵極供電。另外,用作反向電池保護的外部功率NMOS的柵極可由充電泵輸出供電。
前面已經提到,ECU應用要具備休眠功能以滿足低電流消耗的要求。在ATA6026的休眠模式下,可以使用引腳EN或數據喚醒IC。只有幾個模塊處于換醒狀態(帶隙、帶有100 nF外部隔直電容的內部5V穩壓器、檢測EN引腳閾值的輸入結構和SCI接收部分的喚醒模塊)。上電缺省態為激活模式。為了在兩個模式間變化,采用3個步驟。除激活/不激活EN引腳外,還有通過使用SCI收發器實現的第二種喚醒方法。在休眠模式下,SCI收發器部分激活并在單端模式下工作。如果用SCI去激活,則EN引腳能保持低電平,而不干擾激活模式。
由于穩壓器、運動控制、看門狗和通信接口都集成在采用小型QFN封裝的單芯片上,因此可降低系統總成本,同時對幾乎所有種類的電機驅動應用,無需適配,輸出級仍具有即插即用的靈活性。IC包含有運動控制部分,只是PWM速度信號和方向信息必須由微控制器提供。有兩個診斷引腳,使故障安全功能成為可能。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理








評論