現代電動車輛中電控技術的應用

P8xC592內含CAN控制器,包括為實現高性能串行網絡通信所必需的所有硬件,從而能夠控制通信流順利通過CAN協議的局域網。為了避免出現混亂,芯片中增加的CAN控制器對于CPU是作為能夠雙方獨立工作的存儲器映像外圍設備出現的,即可以把P8xC592簡單設想為兩個獨立工作器件的集成體。如果關閉CAN控制器部分的功能,該芯片可以僅作為帶有模擬量A/D轉換的普通8位單片機使用。
啟用CAN控制器的功能,主要借助四個特殊功能寄存器(SPR)實現,CPU對CAN控制器的控制及其訪問都通過它們完成,接口結構如圖2所示。這四個特殊功能寄存器分別為:(1)地址寄存器(CANADR),CPU通過CANADR讀/寫CAN控制器的驗收碼寄存器;(2)數據寄存器(CANDAT),CANDAT對應由CANADR指向的CAN控制器內部寄存器;(3)控制寄存器(CANCON),它具有兩個功能,讀CANCON意味著訪問CAN控制器的中斷寄存器,寫CANCON意味著訪問命令寄存器;(4)狀態寄存器(CANSTA),具有兩個功能,讀CANSTA是訪問CAN控制器的狀態寄存器,寫CANSTA是為后續的DMA傳輸設備內部數據存儲器RAM的地址。此外,DMA邏輯允許CAN控制器與CPU在片主RAM之間的高速數據交換。
在芯片初始化階段,CPU通過向CANCON和CANSTA寫入內容,完成CAN控制器的功能初始化。在實際通訊過程中,CPU則利用四個寄存器使CAN控制器接收和發送數據信息。
2 逆變電源系統硬件構成
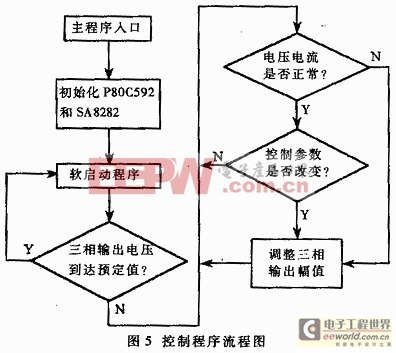
電動車用輔助三相逆變電源從結構上可以分為三個部分:(1)DC/DC多路電源——自動適應直流輸入端的大范圍電壓浮動,為系統的其它電路提供彼此隔離且電壓穩定的低壓電源;(2)主控制板——檢測各路輸出的電壓、電流,根據運行情況智能調整逆變電路的輸出,通過CAN總線參與整車數據通訊;(3)主功率逆變電路——由高度集成的三相逆變模塊IPM組成,完成主電路的逆變功能。
系統基本結構圖如圖3所示,其中未標出給系統各器件供電的DC/DC多路電源。
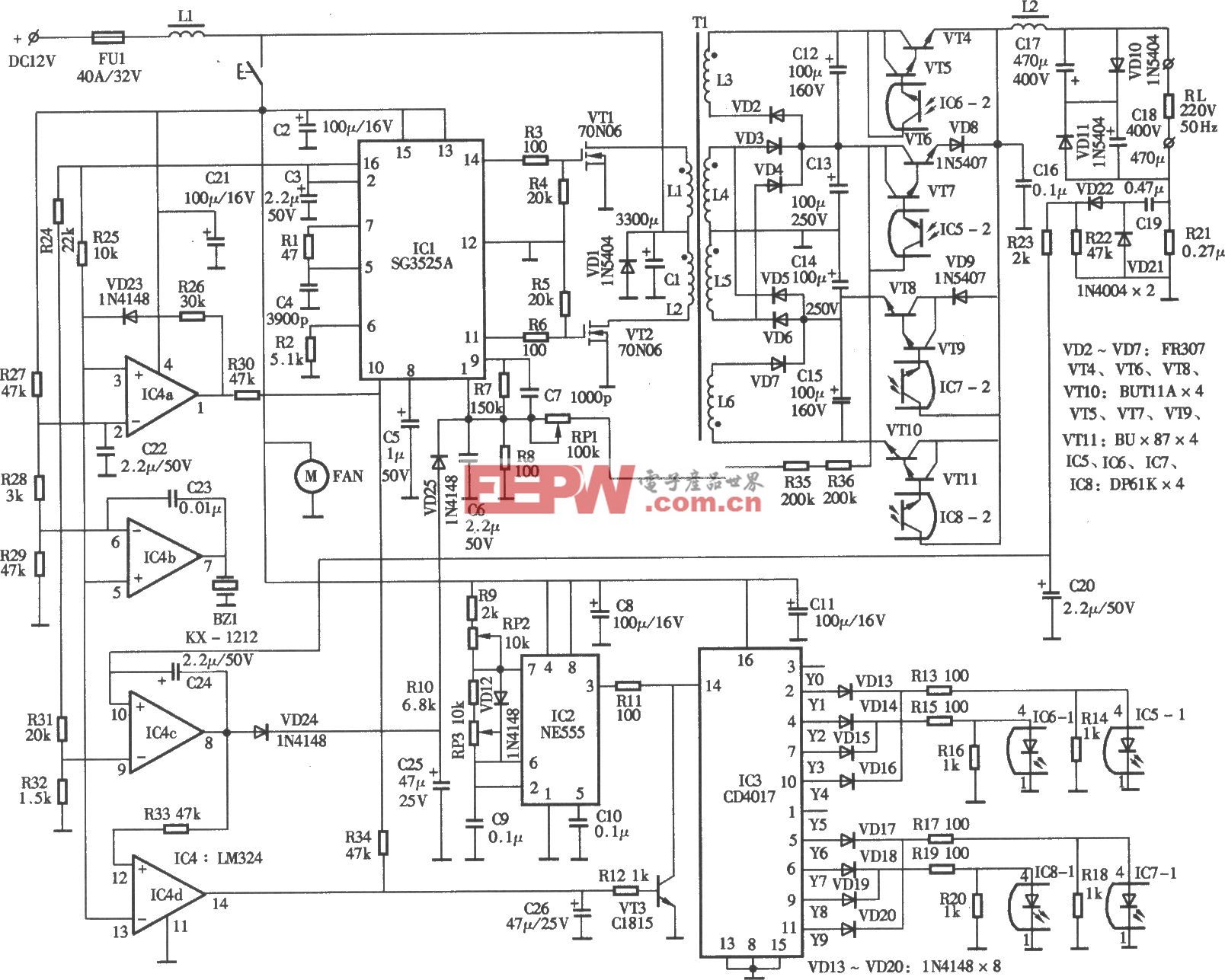
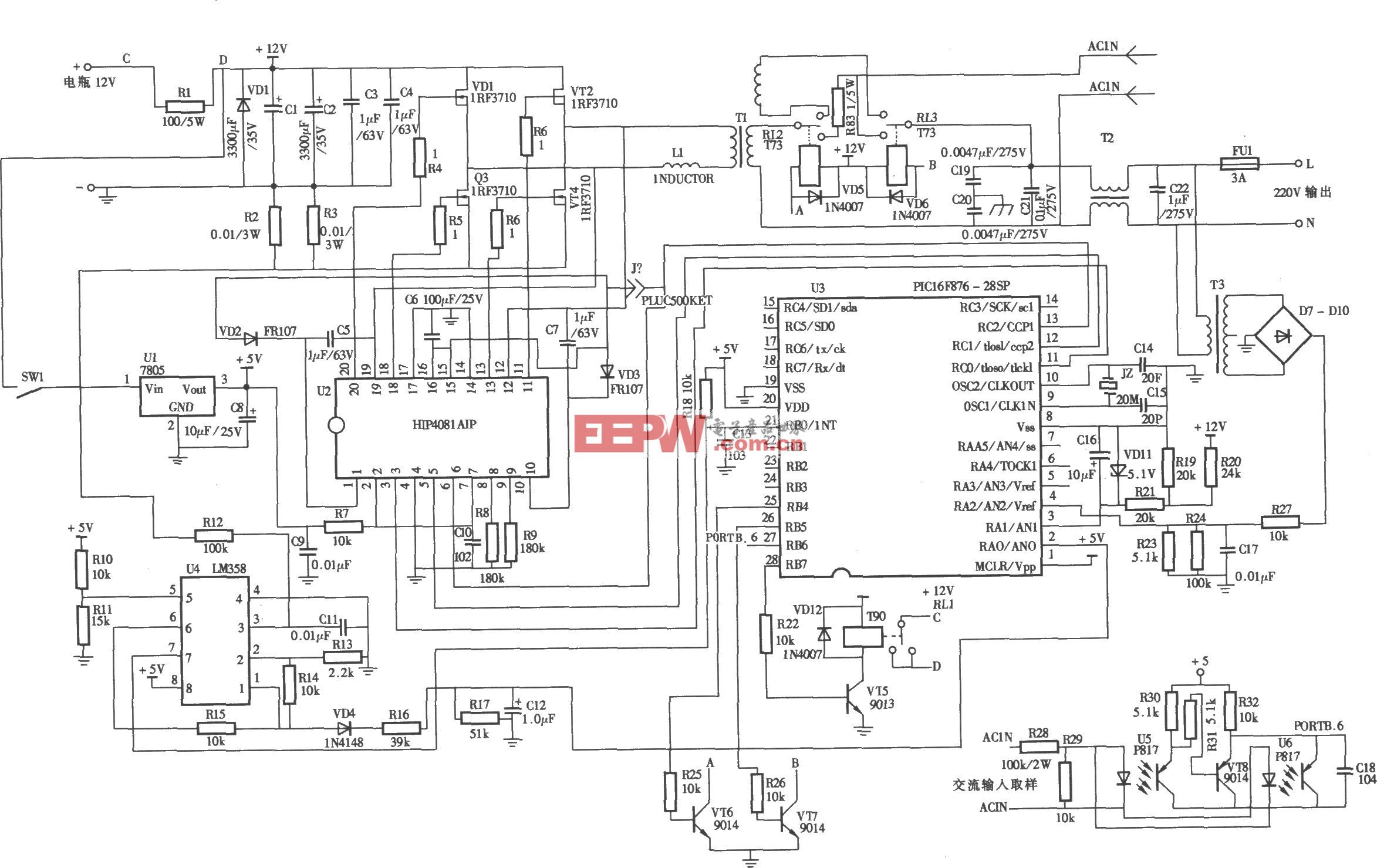
DC/DC多路電源采用開關電源的標準設計,配合具有不同變的多抽頭高頻變壓器,對外輸出5V、12V、20V等多路隔離直流電。同時考慮到電動車電池組電壓的波動范圍相對較大(充滿時為400V,使用過程中可能降低到280V),在設計中選擇了適當的電路結構,取得較好的輸入電壓適應能力。
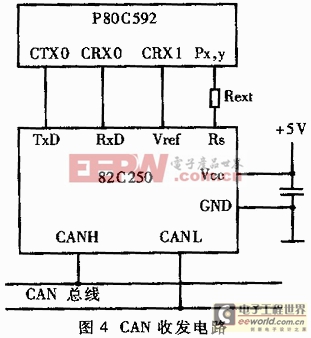
控制板是整個系統的核心,采用P8xC592單片機系統中無片內ROM的P80C592、脈寬調制專用芯片SA8282、CAN總線收發器82C250以及主電路電壓、電流數據采集模塊等。
控制板通過SA8282專用芯片向三相逆變模塊IPM提供6路PWM信號。SA8282芯片由MITEL公司開發生產,其特點是控制簡單、頻率精度高、運行可靠性高,它支持標準8位MOTEL復用數據總線,可以方便地和單片機交換數據。單片機只需對芯片內部的5個數據寄存器賦值,就可以完成對PWM波形輸出的初始化和實時控制。SA8282芯片為標準28腳雙列直插式封裝,管腳RPHT、RPHB、YPHT、YPHB、BPHT、BPHB輸出三相可獨立控制的TTL驅動信號,可對應驅動三相逆變橋上的六路IGBT。


評論