融合傳感器數據的駕駛輔助系統(DAS)

圖像合成
駕駛輔助系統(DAS)正得到越來越廣泛的應用。無論是正在開發中的,還是已經量產的,最新的DAS系統可以幫助駕駛者更好地根據當時的路況來控制車輛。車載傳感器可以探測車輛周圍的環境,包括車道、障礙物,以及道路上的其他車輛。更先進的車載技術甚至可以通過安裝在其他車輛上的遠程傳感器,以及道路兩旁的基礎設施來接收信息。
一般的車輛傳感器通常只有某個特定用途。例如,雷達用于物體探測,超聲波傳感器用于停車監測,攝像頭用于車道監測,每一個傳感器只能提供環境的一部分信息。復雜的傳感器數據融合技術結合了來自不同信息源的數據,從而形成一套全面的環境信息。傳感器數據融合的優點包括:
1.提高測量精度,包括提高準確度、精密度、可靠性、降低錯誤/缺失檢測率,并降低測量噪聲;
2.擴大測量范圍,例如,結合具有不同測量范圍的傳感器;
3.提高傳感器探測車輛周圍環境的魯棒性;
4.通過傳感器協同作用獲得的額外數據,例如:一個傳感器用來測量車輛與物體間的距離,另一個傳感器用來測量相對速度,把兩個傳感器的數據結合起來,就可以獲得車輛的抵達時間。
傳感器數據融合需要高的處理速度和內存配置。通過更高規格的處理器、高效算法在軟件和硬件中的運用,以及新的電路技術,電子儲存和處理能力都得到了提高,這意味著可以實現批量生產。本文將介紹部分傳感器的協同作用。
雷達傳感器
用于汽車行業的雷達,根據其探測距離的不同可分為遠程、中程和短程三大類。TRW專注于遠程和中程雷達的研發,用于物體分類和路面信息探測。
1.遠程雷達(76~77GHz)
汽車遠程雷達的頻率是76~77GHz,通常用來測量目標區域、相對速度和角位置。最大探測距離通常在180~250m之間,水平視野范圍是12°左右(而16~18°正成為新的標準)。
TRW下一代遠程雷達具有一個卡塞格倫天線,可以擴大視野范圍,還有一個調頻、頻移鍵控調控技術(FMFSK)。該產品可用于碰撞預警系統,以加強對靜止障礙物的探測。
2.中程雷達(24GHz)
TRW開發的24GHz中程雷達,最大探測距離達150m,有效控制距離100m,而且水平視野非常寬。該產品已經進行了成本優化,確保其可以應用到更多不同級別的車輛上。
該雷達還可以應用到碰撞預警系統、側向“車道偏離輔助”和“盲點監測”系統中(注:24GHz雷達不受歐盟超寬帶立法限制,該立法將于2013年生效,影響范圍是工業、科學和醫療頻段)。
3.視覺系統
視覺系統通常包含了攝像頭、圖像處理硬件,以及數據傳輸方法。攝像頭用來捕捉可見光圖像,從中提取“特征”。
視頻圖像處理是典型的計算密集型技術。然而,汽車功能的執行需要通過強大的處理電子的應用來實現,廣泛應用的低成本照相機使得攝像系統的成本效益成為可能。TRW的車道監測就是這樣一個系統,通過識別道路標識(例如:外車道上的人行道邊線、分隔迎面駛來的車輛的柵欄),來推斷車輛的位置、行駛方向,以及道路的彎曲度。這些信息用來警醒駕駛者發生車道偏離的可能,方式有聲頻警告(如蜂鳴)、視覺提示和觸覺反饋(如可震動的方向盤)。
汽車傳感器數據融合案例
充分利用數據融合的前置雷達和視覺系統,如今已經運用到量產車上。盡管在下文中沒有明確說明,但其他幾種傳感器,如輪速傳感器、偏航率傳感器和橫向加速度傳感器,也能進行數據融合,進一步提高系統性能。
1.車道偏離輔助
車道偏離輔助需要探測車輛周圍的環境,僅靠一個傳感器來探測附近所有車輛的信息是不切實際的,因此需要一組傳感器來覆蓋所需的探測范圍。TRW Conekt(TRW工程服務機構)在德國曼(MAN)商用車公司的一輛26t商用車上安裝了一組傳感器,用來參與德國汽車工業與道路研發項目INVENT。INVENT項目的目的是進行道路交通研究,以改進交通流并減少事故。這組傳感器由兩個TRW的77GHz雷達傳感器、三個第三方24GHz傳感器以及一個TRW車道攝像頭監測系統組成(見圖1)。

圖1 通過傳感器數據的融合來為車道偏離提供輔助

2.車道監測數據
ACC系統可以獲知主車是否與前方豐輛處于同一車道上。如果是,則主車的車速可能會放緩,以保持系統所設定的間距。系統可利用來自攝像頭系統的車道監測數據,給道路上的其他車輛定位,從而決定主車是否保持與其他車輛的間距(見圖3)。
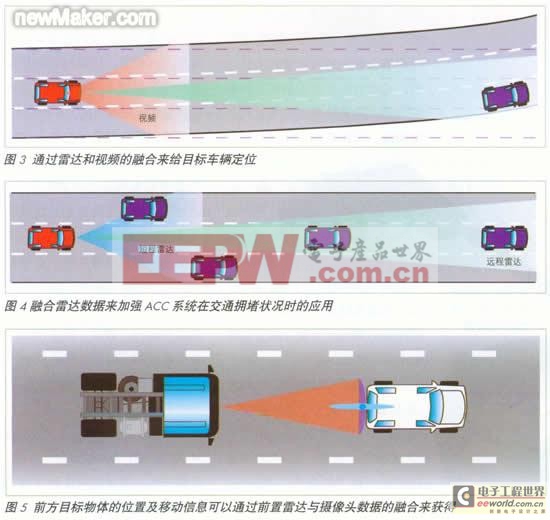
為了支持ACC系統的停-啟功能(也稱交通擁堵輔助功能),必須擴大車輛附近區域的物體監測范圍。如圖4所示,這可以通過一個遠程雷達和一個具有寬闊視野的短程雷達的融合來實現。部分供應商通過使用短程雷達+遠程雷達,或中程雷達+遠程雷達來實現這個功能,但TRW的策略是通過結合雷達和視頻傳感器來實現。
4.物體探測
TRW的雷達傳感器可用于精確的范圍測量和視覺系統的角測量。通過融合技術把這些可互補的測量方法結合起來。這相比于單個傳感器的工作,能夠更精確地給目標物體定位。圖5展示了TRW技術如何把雷達和視頻數據進行融合,給前方車輛準確定位。車輛定位可用于碰撞預警和自動緊急制動。兩個傳感器獨立工作,以確認物體的存在。
5.GNSS定位
ACC系統也可使用來自于車載導航系統的信息。車載導航系統結合了車載地圖和全球導航衛星系統(GNSS)定位。然而,GNSS定位的精確性和有效性有時會比較差,尤其是在建筑物覆蓋區。
若想提高車輛相對于車道的橫向位置精度,可以把來自全球導航衛星系統與攝像頭車道監測系統的信息進行融合。橫向和縱向定位精度都可進一步提高,方法是匹配和比較視頻圖像特征及GNSS地圖特征。這只是DAS利用基礎設施信息系統













評論