基于DSP的數(shù)據(jù)處理模塊的設(shè)計

濾波器遞推方程為:
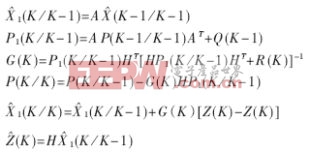
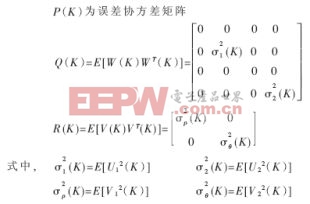
其中, G(K)為卡爾曼增益矩陣
Q(K)、R(K)分別為狀態(tài)噪聲協(xié)方差矩陣和量測噪聲協(xié)方差矩陣
2 基于TMS320C31的數(shù)據(jù)處理模塊的工作原理
2.1 多處理器工作模式下主機和TMS320C31數(shù)據(jù)通信的設(shè)計
數(shù)據(jù)處理模塊由雙口RAM IDT7134、TMS320C31(以下簡稱C31)、EEROM 28F010和高速RAM CY7C199組成,通過ISA總線和主計算機連接起來,構(gòu)成主從式多處理器工作模式,如圖1所示。主從式處理器系統(tǒng)的設(shè)計關(guān)鍵在于處理器之間的數(shù)據(jù)交換,主從處理器間的數(shù)據(jù)交換主要有串行、并行、DMA及雙口RAM四種交換方式。本方案采用IDT公司的雙口RAM IDT7134實現(xiàn)主計算機和C31間的數(shù)據(jù)交換。IDT7134內(nèi)部含有4KB的存儲器資源,具有兩組地址、數(shù)據(jù)總線及讀寫控制線。主計算機和C31可同時對其進行讀寫操作。在對其內(nèi)部同一存儲單元訪問時,要考慮寫入和讀出數(shù)據(jù)的完整性。IDT7134沒有單獨的主從處理器訪問控制引腳,設(shè)計時需用軟件方式來保證主計算機和C31之間數(shù)據(jù)交換的正確性。本方案中采用了在IDT7134中設(shè)置輸入輸出semaphore的方案,即主計算機在將跟蹤雷達的測量數(shù)據(jù)寫入雙口RAM后,設(shè)置輸入semaphore,通知C31讀取測量數(shù)據(jù)。C31進行卡爾曼濾波后,將濾波結(jié)果寫入雙口RAM,設(shè)置輸出semaphore,通知主計算機讀取。雙口RAM的數(shù)據(jù)寬度為8位,C31數(shù)據(jù)總線寬度為32位。雙口RAM的數(shù)據(jù)總線和C31低8位數(shù)據(jù)總線相接。為了提高數(shù)據(jù)處理的精度,雙口RAM中的跟蹤數(shù)據(jù)和C31的濾波結(jié)果都以字(32位)為單位進行存儲,C31作卡爾曼濾波時,首先按字節(jié)讀取跟蹤數(shù)據(jù),然后進行移位,拼接成32位整形數(shù),再將整形數(shù)轉(zhuǎn)換為浮點數(shù),進行濾波運算。輸出時,則將浮點型的結(jié)果轉(zhuǎn)為整形數(shù),按字節(jié)寫入雙口RAM中。雙口RAM空間分配如圖2所示。












評論