基于DSP的空間光通信APT運動控制箱設計

5人機交互界面設計
為了便于使用,采用人機交互界面完成功能選擇、參數設置等操作還可選擇使用APT功能或手動控制電機,并能設定電機運動速度、運動距離和運動方向,以及掃描算法的掃描步長和掃描速度。
5.1人機交互界面程序設計
運動控制箱上電后,人機交互界面同步顯示。進入用戶歡迎界面,而后自動進入主菜單項。通過主菜單項,用戶可選擇使用APT功能或手動控制電機,然后跳轉到相應的用戶界面提示用戶進行下一步的操作。APT功能菜單與手動控制電機菜單程序流程圖分別如圖5、圖6所示。
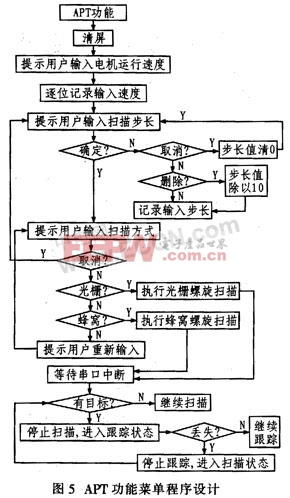
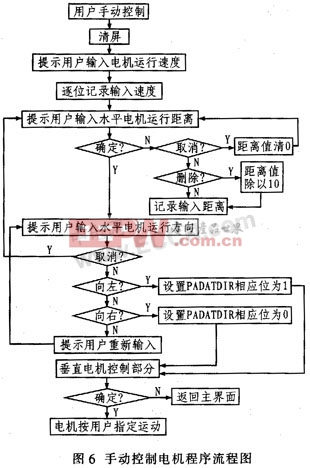
圖5的串口中斷由外部設備引起。圖6的垂直電機控制部分與水平電機控制部分流程相同。若無需與外部設備串口通信,可通過運動控制箱實現電機的二維控制和執行多種掃描算法。
5.2液晶顯示設計
在人機交互界面中,對液晶的操作就是寫指令代碼和讀寫數據。通過寫指令代碼可以設置液晶的工作狀態,通過數據的寫入可以在液晶上顯示。為便于輸入液晶指令、數據,編寫相應函數。寫指令函數代碼如下:
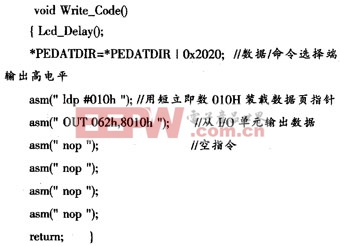
寫數據函數與寫指令函數類似,只是數據/命令選擇端輸出低電平,且從I/O單元輸出數據代碼應分別改為asm("OUT 060h,8000h");和asm("OUT061h,8000h")。
6 結束語
結合空間光通信的具體應用,將APT系統中運動控制單元封裝成箱,完成了空間光通信APT運動控制箱的設計。運動控制箱具有友好的人機界面,可通過該界面的漢字提示完成所需的操作。串口通信單元的設計增加了運動控制箱應用的擴展性。既可作為電機的控制機構實現步進電機的二維控制,也可接收外部設備的串口數據進行相應的控制。









評論