基于PC和FPGA的運動控制系統

3.2.1 最小偏差法插補進給規則
最小偏差法直線插補是將直角坐標的每個象限都用45°斜線分成兩個區域,4個象限共分為8個區域,稱為8個卦限,用0~7表示在某一卦限內,直線插補根據軌跡點偏差的大小選擇沿相應軸方向或對角線方向進給。圓弧插補同樣把一個圓分成8卦限,將圓弧中心作為坐標原點,在不同的卦限,其進給方向不同[5]。如圖5所示為第1象限中0卦限和1卦限的進給示意。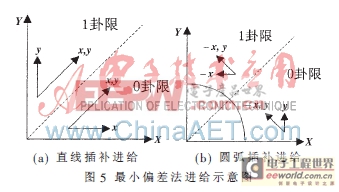
3.2.2 插補模塊實現
插補模塊在FPGA中實現的流程圖如圖6所示。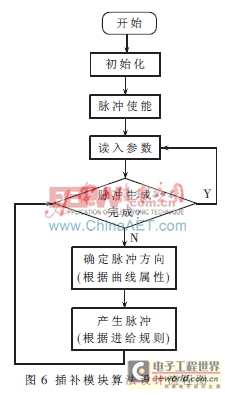
3.2.3 插補模塊的速度補償
由于最小偏差比較法的進給規則是單次沿軸向或者沿對角線方向進給,系統實際運行時的速度會因為曲線各處斜率的不同而變化,降低了運行速度的穩定性。為了解決這個問題,可以從驅動狀態機的時鐘輸入上進行考慮。由于脈沖的產生是通過狀態機實現的,因此可以通過降低沿軸向運動時的脈沖源頻率,提高沿對角線方向的脈沖源頻率來平衡不同斜率軌跡點的運行速度[6]。
設脈沖F單獨驅動單軸運動的速度為Vf,合成速度為V。可以畫出V/Vf隨α的變化的曲線圖,如圖7(a)所示。由圖可知,當角度α=45°時,運動速度最快。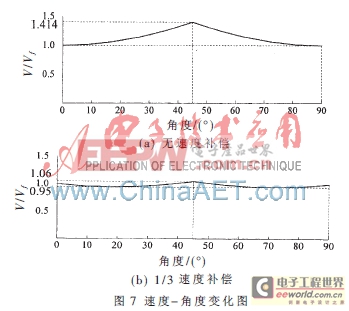
設進給脈沖源的頻率為3f,經過1/N分頻器分頻后再作為進給脈沖,由此可得新的V/Vf關系如下:

則這時V/Vf對?琢的曲線圖就變為如圖7(b)所示。對比圖7(a)、(b),可知其速度穩定性有了明顯的提升。
以上分析是插補模塊設計的理論依據,在編寫模塊時需要考慮許多實際問題。但無論是直線插補模塊還是圓弧插補模塊,其實現方式都是通過狀態機對生成脈沖的程序進行循環,根據原理推演而得到的判斷條件來產生各軸的驅動脈沖與相應旋轉方向的控制信號[7]。
4 仿真與實驗
4.1 基于Matlab仿真
基于最小偏差法的插補模塊被封裝在FPGA中,但其算法在Matlab環境下進行了仿真,圖8所示為半徑為8個脈沖當量的運行軌跡,實現了實際軌跡與理想曲線之間的最小偏差。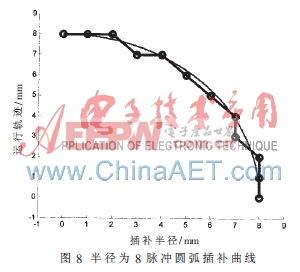









評論