基于CAN總線和雙傳感器的仿人機器人運動控制系統研究

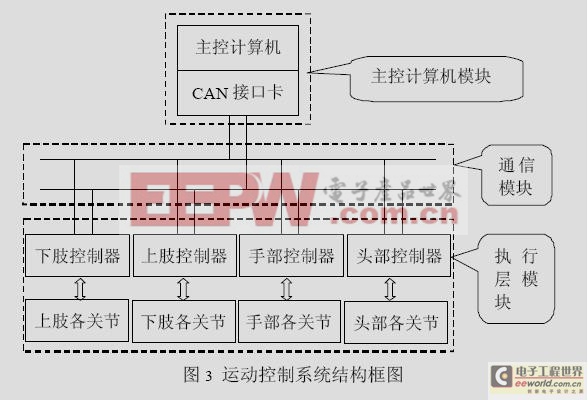
圖3 運動控制系統結構框圖
3 執行層模塊
執行層處于整個控制系統的最底層,由不同類型的控制器組成,主要用來控制各運動關節軸系的具體執行過程。由于各運動關節電機的型號不同、承載的重量不同,對控制精度的要求也不同,我們分別為之設計了不同的運動控制器。
①開環DSP運動控制器
頭部和上肢負載重量較輕,因此采用開環DSP運動控制器來對頭部和上肢各關節進行控制。這些控制器不需要采樣和反饋,直接接收主控計算機發來的控制命令,然后生成相應的執行命令發給各關節軸系,使之轉到相應角度。
②開環MCU運動控制
器手部各個關節體積和質量都很小,故采用開環MCU運動控制器來進行控制。這些控制器采用MCS-51單片機作為處理器,可以直接嵌入到手掌內,它們接收主控計算機的控制命令,利用其IO引腳產生需要的多路脈沖控制信號,控制手部各關節的運動。
③閉環DSP運動控制器
腿部所有軸系均由直流減速驅動型電機構成,帶零位檢測、碼盤和電位計反饋以及多維力/力矩傳感器,結構復雜、控制難度大、精度要求也高,故采用閉環DSP運動控制器。這部分是整個控制系統的關鍵,也是我們研究的重點。
4控制系統流程
整個控制系統的具體流程為:系統開始運行并完成初始化工作;主控計算機根據規劃和計算向底層控制器發送控制命令,底層控制器接收到命令后,結合各傳感器反饋的信息,通過一定的控制算法生成相應的執行命令并發送給各關節執行軸系,同時把底層軸系的運行情況上傳給主控計算機,主控計算機根據新的情況再產生新的命令發送給各控制器,如此反復。這事實上是兩個閉環反饋過程,底層控制器通過傳感器與各關節軸系之間進行小循環反饋,主控計算機通過各控制器與各關節軸系之間進行大回路反饋,這樣可以使機器人具有更多的“智能”,更好的進行離線實時控制。
主控計算機每秒鐘向底層控制器發送200組數據,底層控制器向主控計算機反饋同樣數目的數據,而CAN總線的最大通信速率可以達到幾千幀/秒,完全可以滿足控制的要求。
四、控制器詳細設計
控制下肢的閉環DSP 控制器是整個控制系統的核心部分,承擔著整個機器人的負載重量,輸出功率大,對控制的精度要求也高,因此它的性能直接關系到機器人運動的實現。我們專門為之設計了基于雙位置傳感器的閉環DSP控制器,其結構如圖4 所示。
DSP主處理器選用的是TI公司的TMS320LF2407A芯片,它是TI 家族C2000 系列中的高檔產品,非常適用于工業控制。它的兩個事件管理器功能尤為強大,完全是為電機控制設計的,可利用多個PWM脈沖通道直接產生需要的PWM脈沖控制信號;其CAN總線模塊可以直接與主控計算機進行通信而不需要增加CAN總線控制器;外部看門狗可以對控制器電壓進行監控;外部存儲器中存放著控制算法所需的必要參數。
控制器的雙位置傳感器由電壓輸出傳感器和光電碼盤傳感器組成。其中,電壓傳感器把軸系的位置信息轉換成電壓信號,經過放大電路放大,再經過專門的A/D轉換器轉換成數字信號送入DSP主處理器。不用TMS320LF2407A自帶的A/D轉換器而使用專門的A/D轉換芯片,這是為了提高轉換的精度,因為TMS320LF2407A 的A/D轉換器所能接受的最高轉換電壓只有3.3V,而經過功率放大后的電壓遠遠超出了此范圍,所以使用了專門的A/D轉換芯片。這部分電路雖然增加了控制器的復雜程度,卻可以大大提高轉換精度,所以是十分值得的。
碼盤傳感器把軸系的位置信息轉換成脈沖信號,經過光電隔離器件隔離后送入專用脈沖計數器,計數后的信息送入DSP主處理器。脈沖計數器選用當今流行的CPLD器件,其強大的功能對提高控制器的性能有很大的幫助,同時還可以作為譯碼電路為主處理器提供譯碼功能。主處理器通過對接收到的傳感器信號進行分析和計算之后產生相應的PWM脈沖控制信號,經過光電隔離和功率放大后送給底層軸系控制軸系的運行。使用雙傳感器可以大大提高反饋的精度,兩路信號可以同時考慮,也可以一路為主,另外一路提供補充和參考。
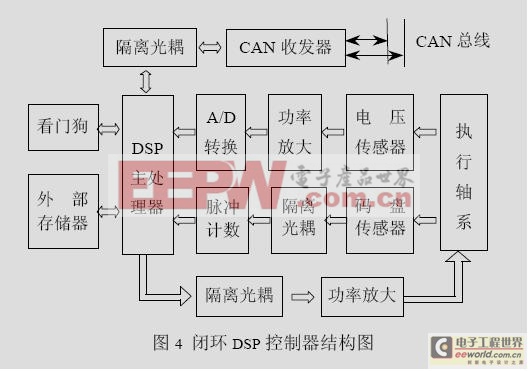
圖4 閉環DSP控制器結構圖
主處理器通過CAN總線與主控計算機進行通信,接收主控計算機的命令并把底層信息反饋給主控計算機,實現更高一級的反饋控制。主處理器通過CAN總線收發器連接到總線上,為提高精度,中間需要進行光電隔離。該控制器直接安裝在仿人機器人的體內,每個控制器可以同時控制6 個關節軸系,整個下肢只需要兩個控制器就可以實現其運動控制。
五、結論
我們在充分吸收當今相關學科高技術成果的基礎上,設計出一套速度快、穩定性強、集成度高、結構靈活、使用方便的仿人機器人運動控制系統。整個運動控制系統可直接嵌入到機器人本體內,以便在實際運行中圓滿地完成規定的控制任務。同時,該控制系統還有很強的擴展功能,可以方便地移植到其它類似的控制機構中去,是一種多功能通用型控制系統,具有廣闊的應用前景。











評論