基于CAN總線和雙傳感器的仿人機(jī)器人運(yùn)動(dòng)控制系統(tǒng)研究
作者:
時(shí)間:2012-02-24
來(lái)源:網(wǎng)絡(luò)
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
機(jī)器人研究是自動(dòng)化領(lǐng)域最復(fù)雜、最具挑戰(zhàn)性的課題,它集機(jī)械、電子、計(jì)算機(jī)、材料、傳感器、控制技術(shù)等多門(mén)學(xué)科于一體,是多學(xué)科高技術(shù)成果的集中體現(xiàn)。而仿人步行機(jī)器人技術(shù)的研究更是處于機(jī)器人課題研究的前沿,它在一定程度上代表了一個(gè)國(guó)家的高科技發(fā)展水平。運(yùn)動(dòng)控制系統(tǒng)是機(jī)器人控制技術(shù)的核心,也是機(jī)器人研究領(lǐng)域的關(guān)鍵技術(shù)之一,在機(jī)器人控制中具有舉足輕重的地位,因此,各研究機(jī)構(gòu)都把對(duì)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的研究作為首要任務(wù)。
動(dòng)作協(xié)調(diào)、具有一定智能、能實(shí)現(xiàn)無(wú)線實(shí)時(shí)行走已經(jīng)成為當(dāng)今機(jī)器人發(fā)展的主題。隨著以電子計(jì)算機(jī)和數(shù)字電子技術(shù)為代表的現(xiàn)代高技術(shù)的不斷發(fā)展,特別是以DSP為代表的高速數(shù)字信號(hào)處理器和大規(guī)模可編程邏輯器件(CPLD 和FPGA為代表)的廣泛應(yīng)用,機(jī)器人運(yùn)動(dòng)控制系統(tǒng)也從以前單一的結(jié)構(gòu)和簡(jiǎn)單的功能向著結(jié)構(gòu)化、標(biāo)準(zhǔn)化、模塊化和高度集成化的方向發(fā)展,采用開(kāi)放式體系結(jié)構(gòu)已經(jīng)成為該技術(shù)發(fā)展的一種必然趨勢(shì)。本文作者正是順應(yīng)這一趨勢(shì),設(shè)計(jì)出一種多功能分布式仿人機(jī)器人運(yùn)動(dòng)控制系統(tǒng)。
二、控制對(duì)象與要求
我們以國(guó)防科技大學(xué)機(jī)電工程與自動(dòng)化學(xué)院機(jī)器人教研室最新研制的新一代仿人步行機(jī)器人為研究對(duì)象。該機(jī)器人高約1.55m,重約65kg,使用電池供電,無(wú)需外接電源和控制信號(hào)線,可以實(shí)現(xiàn)無(wú)纜行走,還可以完成人的腿部、手部和頭部的一些基本動(dòng)作,已經(jīng)初步具備了人類(lèi)的外形特征。
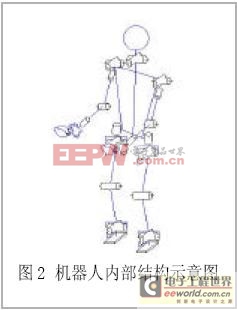
這臺(tái)新型仿人機(jī)器人一共具有36個(gè)自由度(如圖2所示),其中上肢12個(gè),下肢12個(gè),頭部2個(gè),手部10個(gè);下肢各個(gè)關(guān)節(jié)有位置傳感器,足部有多維力矩傳感器;具有視覺(jué)傳感、語(yǔ)音控制系統(tǒng)以及無(wú)線遙控模塊;整個(gè)控制系統(tǒng)、電源集成在機(jī)器人本體上。為了使之真正具有“仿人”的特點(diǎn),控制系統(tǒng)必須能夠完成包括運(yùn)動(dòng)控制與規(guī)劃、視覺(jué)感知處理、語(yǔ)音識(shí)別和其它環(huán)境感知在內(nèi)的多種功能。其中,運(yùn)動(dòng)控制是整個(gè)控制系統(tǒng)的關(guān)鍵,它必須能夠滿(mǎn)足以下要求:
(1)系統(tǒng)集成度高、體積小、重量輕、功率大、效率高和機(jī)載化。
(2)各個(gè)模塊之間的連接簡(jiǎn)潔,便于安裝和維護(hù)。
(3)控制器應(yīng)具有良好的動(dòng)態(tài)響應(yīng)和跟隨特性,穩(wěn)態(tài)誤差和靜態(tài)誤差小。
(4)系統(tǒng)集成在機(jī)器人本體上,電磁干擾較強(qiáng),必須具有較強(qiáng)的抗干擾能力。
(5)各部分的數(shù)據(jù)交換必須實(shí)時(shí)有效和準(zhǔn)確可靠。
三、動(dòng)控制系統(tǒng)設(shè)計(jì)
根據(jù)以上要求,我們?cè)O(shè)計(jì)了一種基于CAN現(xiàn)場(chǎng)總線的新型控制結(jié)構(gòu)。整個(gè)控制系統(tǒng)采用集中管理分散控制的方式,按照控制系統(tǒng)的結(jié)構(gòu)和功能劃分為三層:組織層、協(xié)調(diào)層、執(zhí)行層。其中,組織層由機(jī)器人本體外的一臺(tái)工作站組成,主要負(fù)責(zé)實(shí)現(xiàn)人機(jī)交互、無(wú)線通訊、語(yǔ)音、視覺(jué)以及宏指令生成等功能,屬于智能控制范疇,本文不做深入探討;協(xié)調(diào)層和執(zhí)行層都集成在機(jī)器人本體上,完成具體的控制任務(wù),屬于物理控制范疇,是我們通常意義上的控制系統(tǒng),其具體結(jié)構(gòu)如圖3 所示。
1、主控計(jì)算機(jī)模塊
主控計(jì)算機(jī)要求體積小、運(yùn)算速度快,通常采用小板工業(yè)控制計(jì)算機(jī),同時(shí)配備液晶顯示器和自制專(zhuān)用功能鍵盤(pán),主要完成在線運(yùn)動(dòng)規(guī)劃、動(dòng)作級(jí)運(yùn)動(dòng)控制、語(yǔ)音交互控制、視覺(jué)導(dǎo)引控制以及人機(jī)交互等功能。它接受本地傳感器的信息,根據(jù)一定的控制算法和任務(wù)要求,實(shí)時(shí)生成關(guān)節(jié)軸系的任務(wù)規(guī)劃數(shù)據(jù)并通過(guò)數(shù)據(jù)傳輸總線送至各底層運(yùn)動(dòng)控制器。
2、通信模塊
主控計(jì)算機(jī)和各控制器之間采用CAN總線進(jìn)行通信。CAN(Controller AreaNetwork)總線是應(yīng)用最為廣泛的一種現(xiàn)場(chǎng)總線,也是目前為止唯一有國(guó)際標(biāo)準(zhǔn)的現(xiàn)場(chǎng)總線。相對(duì)于一般通信總線,它的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性。其特點(diǎn)主要有:
(1)CAN總線為多主方式,網(wǎng)絡(luò)上任一節(jié)點(diǎn)均可在任意時(shí)刻向其它節(jié)點(diǎn)發(fā)送數(shù)據(jù)。
(2)CAN總線上的節(jié)點(diǎn)可以通過(guò)標(biāo)識(shí)符分成不同的優(yōu)先級(jí),滿(mǎn)足不同的實(shí)時(shí)要求。
(3)CAN 總線采用非破壞的總線仲裁技術(shù),低優(yōu)先級(jí)節(jié)點(diǎn)不影響高優(yōu)先級(jí)節(jié)點(diǎn)的發(fā)送。
(4)CAN總線節(jié)點(diǎn)在40m內(nèi)通信速率最高可達(dá)1MBPS。
(5)CAN總線上的節(jié)點(diǎn)數(shù)在標(biāo)準(zhǔn)幀格式下可達(dá)到110個(gè),擴(kuò)展幀格式下幾乎不受限制。
(6)報(bào)文采用短幀格式,傳輸時(shí)間短,出錯(cuò)率極低。
(7)CAN總線通信介質(zhì)可選用雙絞線,其結(jié)構(gòu)靈活,連接方便。
CAN總線的以上特點(diǎn)使之十分適用于機(jī)器人控制,鑒于此,本文選用CAN總線作為機(jī)器人控制系統(tǒng)的通信工具。具體連接方式為:主控計(jì)算機(jī)通過(guò)CAN總線接口卡連接到總線上,各運(yùn)動(dòng)控制器也都通過(guò)總線收發(fā)器掛接到總線上,而且可以根據(jù)實(shí)際情況增減數(shù)目。由于CAN總線只用兩根線進(jìn)行通信,大大降低了系統(tǒng)連線的復(fù)雜程度,同時(shí)增強(qiáng)了系統(tǒng)的可靠性能。











評(píng)論