基于MC9S12DGl28的自主尋跡智能車控制系統

1 引言
智能汽車是汽車電子、人工智能、模式識別、自動控制、計算機、機械多個學科領域的交叉綜合的體現,具有重要的應用價值。智能尋跡車是基于飛思卡爾MC9S12DGl28單片機開發實現的,該系統采用CCD傳感器識別道路中央黑色的引導線,利用傳感器檢測智能車的加速度和速度,在此基礎上利用合理的算法控制智能車運動,從而實現快速穩定的尋跡行駛。
2 硬件系統設計
該系統硬件設計主要由MC9S12DGl28控制核心、電源管理模塊、直流電機驅動模塊、轉向舵機控制模塊、道路信息檢測模塊、速度檢測模塊和加速度檢測模塊等組成,其結構框圖如圖1所示。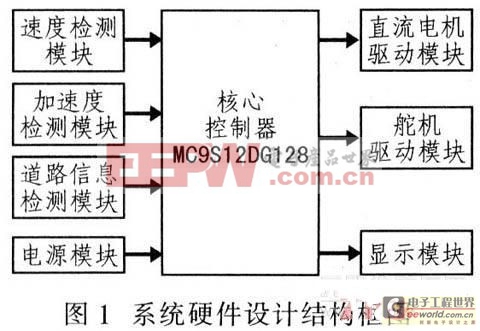
2.1 主控制器模塊
智能車的控制核心為MC9S12DGl28。MC9S12DGl28是飛思卡爾公司生產的一款16位單片機,片內總線時鐘可達到25 MHz;片內資源包括8 K RAM、128 K Flash、2 K EEP-ROM;SCI,SPI,PWM和串行接口模塊;脈寬調制模塊(PWM)可設置成4路8位或2路16位,邏輯時鐘選擇頻率脈寬:2個8路10位A/D轉換器,增強型捕捉定時器并支持背景調試模式等。
2.2 電源管理模塊
該系統設計采用7.2 V/1 800 mA鎳鎘電池供電,7.2 V電壓經過BMlll7—5穩壓后得到5 V電壓,向單片機、紅外傳感器和加速度傳感器供電。5 V電壓經MAX8715升壓后得到12 V電壓,向CCD圖像傳感器供電:7.2 V電壓經二極管降壓得到約6 V的電壓來驅動舵機;電機驅動器MC33886則直接由電源供電。
2.3 道路信息檢測模塊
該系統設計使用NEC公司的線陣CCDμPD3575D檢測賽道信息。該器件可工作在5 V驅動(脈沖)和12 V電源條件下。μPD3575D的驅動需要4路脈沖,分別為轉移柵時鐘φIO、復位時鐘φRD、采樣保持時鐘φSHO和傳輸門時鐘φTG。系統設計由外圍電路直接產生CCD驅動時鐘,采用計數器和觸發器專門設計時序電路,產生轉移柵時鐘φIO、復位時鐘φRO、采樣保持時鐘φSHO,單片機只需產生一個幀同步信號(傳輸門信號φTG)與外圍時序電路保持同步即可。μPD3575D輸出的是模擬信號,將采集圖像傳輸至單片機,一般需對μPD3575D輸出信號進行A/D轉換,考慮到設計實際上只需要區分黑色和白色,μPD3575D對這兩種輸出信號差異較大,因此,將μPD3575D輸出信號放大后直接使用一個比較器對信號二值化處理,如圖2所示。由單片機檢測二值信號的跳變時間,便可計算出黑線位置,從而進一步縮短單片機在CCD上所消耗的時間。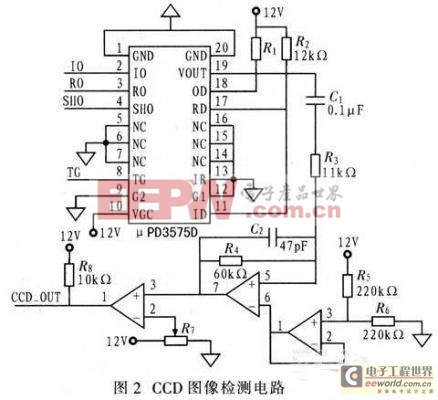
2.4 車速檢測模塊
系統使用紅外傳感器檢測直流電機的轉速。在后輪減速齒輪上粘貼一個均勻分布有黑白條紋的編碼盤。紅外接收管接收與未接收紅外光所表現的特性是阻抗變化,所以只需用一個電阻電壓變換電路和比較電路便可將其模擬信號轉換為數字信號,供單片機采集。
2.5 直流電機驅動模塊
系統采用RS380-ST型直流電機,其驅動電路采用集成電機驅動器MC333886。此器件是單片集成的H橋元件,有單橋和雙橋兩種控制方式,其可控電壓為5~40 V,最大PWM頻率達10 kHz,內置短路保護電路和過熱保護電路,最大能承受的5 A的工作電流。其中D1、D2是MC33886的使能端,INl、IN2為輸入端,0UTl、0UT2為其輸出端。圖3是將MC33886的D2端接到單片機的PWM輸出端口,通過MC33886的兩個輸出端口實現電機的轉速控制、方向控制及制動等。采用輸出端并聯并連接到電機一端,以及增加散熱片的方法使智能車在相同電壓和占空比時,其速度更快,同時還降低H橋上的壓降,減少MC33886發熱,防止器件由于溫度過高被燒毀。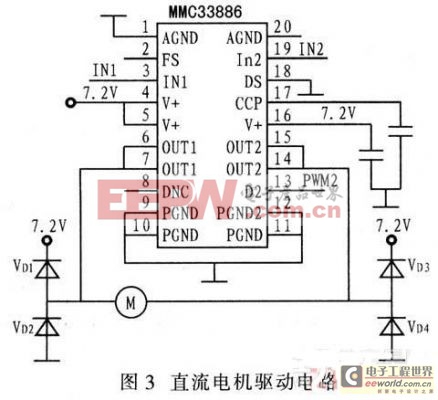
2.6 加速度檢測模塊
智能車在高速行駛中如果突然轉向,會出現側滑現象。該系統設計采用ADXL202加速度傳感器判斷移動智能小車在行駛中是否出現側滑現象。ADXL202是美國ADI公司推出的低成本雙軸加速度傳感器,其外圍電路簡單.采用5 V供電,將加速度傳感器的輸出端9引腳和10引腳直接接到單片機的AN00,AN01引腳,通過計算輸出信號的占空比可
精確檢測軸向和橫向加速度。
2.7 轉向控制模塊
智能車使用韓國futaba公司的S3010舵機完成轉向控制。舵機控制信號由單片機的PWM模塊PWM0和PWMl聯合產生一個16位的PWM信號。由于舵機的轉角與脈沖寬度存在線性關系,改變PWM占空比可改變輸出脈沖的寬度。從而控制舵機轉向。將驅動舵機脈沖波型的周期從原來的20ms減小到10 ms,增加舵機控制信號的更新頻率,減少舵機控制環節中的延時,提高整個車模轉向控制速度。
3 系統軟件設計
系統的基本控制策略是根據CCD傳感器檢測到的路徑信息,車速檢測模塊檢測到的當前車速信息和加速度傳感器檢測到的加速度信息,來控制舵機和直流驅動電機運動。
3.1 車速控制
為了提高機器人運行的穩定性,采用PID算法實現直流電機的轉速閉環調節,PID控制器的輸入量為給定轉速與輸出轉速的差值,采用增量式PID算法。
3.2 智能車平穩性控制
為了避免智能車發生側滑現象,應在智能車上安裝加速度傳感器,以檢測是否發生側滑。車速為v,轉向角為δ,車體質量為m,軸距為l,當理想轉向時,向心加速度為a,則a=mv2tanδ/l。當加速度傳感器反饋回的實際加速度a*小于理論加速度a時(實際中應當保持一定的死區),表明智能車系統存在側滑現象。這時便命令智能移動小車減速,速度參考量為

pid控制器相關文章:pid控制器原理






評論