永磁同步調(diào)速系統(tǒng)自整定PI速度控制器設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
3 仿真和實(shí)驗(yàn)結(jié)果
3.1 仿真結(jié)果
通過(guò)Simulink進(jìn)行仿真,可得到用增益整定PI速度控制器、PI電流控制器控制的PMSM雙閉環(huán)控制系統(tǒng)的控制效果。電機(jī)參數(shù):Rs=2.8 75 Ω,Ld=Lq=8.5 mH,ψ=0.175 Wb,J=0.093 kg·m2,np=4。增益整定PI速度控制器的參數(shù):Kpmax=0.15,Kpmin=0.12,a=1,Kimax =0.009,η=5,ε=0.002。當(dāng)速度給定為變化的值時(shí),速度響應(yīng)曲線(xiàn)如圖3所示。
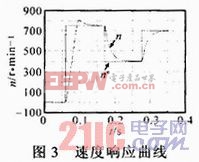
可知,第一次設(shè)定值為750 r·min-1,由零第一次到達(dá)750 r.min-1用時(shí)約0.032 s,并且從響應(yīng)開(kāi)始至到達(dá)穩(wěn)態(tài)用時(shí)約0.1 s,超調(diào)量約為6.6%。在0.17 s左右設(shè)定值突變?yōu)?00 r·min-1,在沒(méi)有超調(diào)的情況下,用時(shí)約0.08 s響應(yīng)達(dá)到穩(wěn)態(tài)。在0.28 s左右給定值變?yōu)?00 r·min-1,同樣在沒(méi)有超調(diào)的情況下,約用0.08 s響應(yīng)到達(dá)穩(wěn)態(tài)。就響應(yīng)速度和超調(diào)量來(lái)看,基本滿(mǎn)足一般的控制要求。
可知,在0.06 s處.當(dāng)突加一個(gè)750 r·rain-1的速度時(shí),給定與實(shí)際轉(zhuǎn)速的差值相當(dāng)大,因而kp(t)由最小值突增到最大值,然后繼續(xù)保持在最大,而ki(t)則從最大驟然降為零,并保持在零處。在0.092 s左右,由于實(shí)際速度基本到達(dá)期望速度,因而,kp(t)由原來(lái)的最大值降為最小值,而ki(t)則由零突增到接近最大值,然后由于超調(diào)的產(chǎn)生,使得差值相對(duì)增大,因而積分作用再次減弱。比例放大作用再次增強(qiáng)。直至到達(dá)穩(wěn)態(tài)時(shí),kp(t)和ki(t)都趨向于一個(gè)適宜的穩(wěn)態(tài)值,使系統(tǒng)繼續(xù)保持穩(wěn)定。在后面兩個(gè)給定值發(fā)生變化的過(guò)程中,kp(t)與ki(t)的變化與第一個(gè)過(guò)程基本相同,在此不再贅述。由Matlab仿真的3個(gè)過(guò)程可知,比例與積分這兩個(gè)增益的協(xié)調(diào)變化與預(yù)先設(shè)想的相同,并且能夠使系統(tǒng)達(dá)到較滿(mǎn)意的控制效果,從而驗(yàn)證了理論分析的正確性。
3.2 實(shí)驗(yàn)結(jié)果
結(jié)合上述理論分析和系統(tǒng)仿真,對(duì)理論進(jìn)行了實(shí)驗(yàn)驗(yàn)證。圖5a為速度不斷變化時(shí)的速度響應(yīng)曲線(xiàn)。可知,當(dāng)期望值與起始值的差值較大時(shí),kp(t)的作用很強(qiáng),會(huì)產(chǎn)生足夠小的超調(diào)量;而當(dāng)差值較小時(shí),則沒(méi)有超調(diào),并在約0.1 s內(nèi)無(wú)靜差地到達(dá)期望值。這與系統(tǒng)仿真的結(jié)果基本相符。圖5b為速度在給定值為700 r·rain-1時(shí)的速度響應(yīng)曲線(xiàn)。可知,從起始的100 r·min-1到達(dá)給定的700 r·rain-1,用時(shí)約為0.1 s,且只有很小的超調(diào)量。
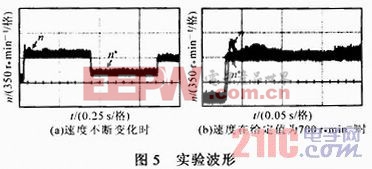
由實(shí)驗(yàn)結(jié)果可知,按上述方法設(shè)計(jì)的控制器能夠在無(wú)需人為調(diào)節(jié)的情況下較好地滿(mǎn)足系統(tǒng)的控制要求,并且與仿真結(jié)果基本相符,再次證明了理論分析的正確性。
4 結(jié)論
需要指出,此處只是以速度控制器為例介紹了上述設(shè)計(jì)方法,此方法還可用于電流控制器的設(shè)計(jì)。由上述的理論分析、系統(tǒng)仿真和實(shí)驗(yàn)驗(yàn)證可知,使用增益整定PI速度控制器在參數(shù)不準(zhǔn)確和給定值頻繁變化的情況下,可以簡(jiǎn)單、快捷地達(dá)到較好的控制效果,可以很好地模擬手動(dòng)調(diào)節(jié)的過(guò)程,而無(wú)需人為地憑借經(jīng)驗(yàn)調(diào)節(jié)或者是經(jīng)過(guò)繁瑣的計(jì)算得出,因而這種增益整定控制器的設(shè)計(jì)方法有很好的實(shí)際應(yīng)用價(jià)值。








評(píng)論