基于Flexray總線(xiàn)的車(chē)載指揮控制任務(wù)計(jì)算機(jī)的設(shè)計(jì)與實(shí)現(xiàn)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
0 引言
在現(xiàn)代戰(zhàn)爭(zhēng)中,無(wú)人機(jī)相對(duì)有人機(jī)而言具有低成本、零傷亡、高機(jī)動(dòng)、可重復(fù)使用等諸多優(yōu)勢(shì),其使用范圍已擴(kuò)展到軍事、民用等領(lǐng)域。在軍事上可用于偵察、監(jiān)視、通信中繼、電子對(duì)抗、戰(zhàn)果評(píng)估等;在民用上可用于大地測(cè)量、氣象觀測(cè)、城市環(huán)境監(jiān)測(cè)、地球資源勘探、森林防火、核污染生化污染區(qū)的取樣與監(jiān)控等。無(wú)人機(jī)系統(tǒng)通常由機(jī)載系統(tǒng)、數(shù)據(jù)鏈和地面站組成。
地面站是無(wú)人機(jī)系統(tǒng)的中樞,它的主要功能包括:任務(wù)計(jì)劃、飛行控制、信息處理顯示、目標(biāo)檢測(cè)和定位、數(shù)據(jù)記錄等。車(chē)載地面站由于其機(jī)動(dòng)性好、便于快速部署、可迅速到達(dá)任務(wù)區(qū)域附近而受到用戶(hù)青睞。但車(chē)載地面站面臨高低溫、高濕、沖擊、振動(dòng)、電磁輻射干擾等惡劣環(huán)境,以及對(duì)其性能、體積、重量、功耗等的苛刻要求,普通的商用計(jì)算機(jī)無(wú)法滿(mǎn)足車(chē)載環(huán)境要求及控制的實(shí)時(shí)性要求。 本文針對(duì)某車(chē)載無(wú)人機(jī)地面站的需求,提出了一種指揮控制計(jì)算機(jī)設(shè)計(jì)方案及實(shí)現(xiàn)方法。
1 系統(tǒng)功能分析
無(wú)人機(jī)地面站指揮控制計(jì)算機(jī)用于無(wú)人機(jī)的跟蹤和指令控制。它通過(guò)無(wú)線(xiàn)電接收機(jī)接收無(wú)人機(jī)遙感傳送的圖像信號(hào),經(jīng)圖像處理后送給車(chē)載地面站的駕駛員,同時(shí)由指揮控制計(jì)算機(jī)進(jìn)行圖像貯存。 車(chē)載地面站的駕駛員可對(duì)無(wú)人機(jī)的飛行及其任務(wù)的執(zhí)行進(jìn)行監(jiān)視,通過(guò)地面站的指令發(fā)射機(jī)可向無(wú)人機(jī)發(fā)出控制指令,無(wú)人機(jī)接收后按照命令可不斷調(diào)整飛行路線(xiàn),完成任務(wù)。圖1為車(chē)載無(wú)人機(jī)地面站指揮控制計(jì)算機(jī)的系統(tǒng)交聯(lián)圖。
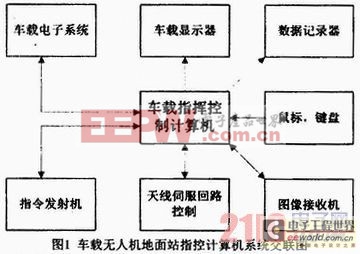
車(chē)載指揮控制計(jì)算機(jī)是車(chē)載地面站的核心,是系統(tǒng)正常有序工作的重要控制部件。指揮控制計(jì)算機(jī)負(fù)責(zé)組織管理車(chē)載地面站內(nèi)部設(shè)備,使地面站內(nèi)各設(shè)備能夠有序協(xié)調(diào)工作,并通過(guò)FlexRay總線(xiàn)與車(chē)載電子系統(tǒng)進(jìn)行數(shù)據(jù)交換,保障地面站捕獲無(wú)人機(jī)發(fā)回的任務(wù)區(qū)域圖像信號(hào),及時(shí)將地面站駕駛員的操控指令發(fā)射至無(wú)人機(jī)。其主要功能如下:
(1)進(jìn)行地面站與車(chē)載電子系統(tǒng)之間的信息交換;
(2)采集駕駛員發(fā)出的操控指令,并將指令傳送至指令發(fā)射機(jī),由指令發(fā)射機(jī)調(diào)制后發(fā)射至無(wú)人機(jī),同時(shí)將操控指令發(fā)送給記錄器進(jìn)行記錄;
(3)控制指令發(fā)射機(jī)、圖像接收機(jī)天線(xiàn)伺服系統(tǒng)轉(zhuǎn)動(dòng),使天線(xiàn)主波瓣對(duì)準(zhǔn)無(wú)人機(jī)以獲得最佳的信號(hào)強(qiáng)度;
(4)采集圖像接收機(jī)傳送來(lái)的圖像數(shù)據(jù)信號(hào),并將圖像顯示在車(chē)載顯示器上,同時(shí)將圖像記錄在記錄器上;
(5)控制地面站內(nèi)各設(shè)備的自檢和周期性監(jiān)測(cè)。
2 車(chē)載指揮控制計(jì)算機(jī)系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
隨著車(chē)載計(jì)算機(jī)的體積小型化、功能多元化和操作實(shí)時(shí)化,要求新一代無(wú)人機(jī)地面站指揮控制計(jì)算機(jī)必須是體積小、重量輕、功耗低的、可支持多任務(wù)實(shí)時(shí)操作系統(tǒng)的嵌入式計(jì)算機(jī)。根據(jù)指揮控制計(jì)算機(jī)的功能性能要求,可將指揮控制計(jì)算機(jī)劃分為處理器模塊、接口模塊、顯示模塊、通信模塊、電源模塊等5個(gè)功能模塊,各功能模塊通過(guò)CPCI總線(xiàn)進(jìn)行通訊。

評(píng)論