基于NiosII軟核處理器的步進電機接口設計

電子技術發展日新月異,控制技術也發生了革命性的變化,特別是SOC技術的發展,文中主要研究的是遠程控制系統中步進電機控制模塊設計。首先,根據控制功能的要求設計了步進電機控制模塊,該模塊采用一種脈沖疊加算法,實現了對步進電機任意頻率變速;然后,將該模塊封裝到SOPC Builder的標準模塊庫中;最后,利用SOPC技術,在Altera公司的Cyclone II EP2C35芯片上集成了NiosII軟核,相關的外圍控制器和自定義的電機控制模塊,完成了該設計的驗證工作。
1 基本原理
步進電機是一種把電脈沖信號變換成直線位移或角位移的執行元件。步進電機的轉子做成多極的,定子上嵌裝有多相不同連接的控制繞組,有專用電源供電。每輸入一個脈沖,步進電機就前進一步,故又叫做脈沖電動機。其角位移量與脈沖數成正比;線速度或轉速與脈沖頻率成正比。本文是針對的四相反應式步進電機而設計的控制器,它的定子磁極上增加了小齒,轉子也做成多極的,定、轉子的齒距相同,齒數也適當的配合。這樣,在一對磁極下,定、轉子齒在對正時,下一相繞組下的定轉子齒錯開t/m(t為齒間距,m為相數),再下一相繞組下定、轉子齒錯開2t/m,并以此類推,在定子磁場的作用下,由于轉子力圖取最大的磁導位置,所以每一拍,轉子轉過相當t/m齒矩的角度(步距角):

步進電機常用的有四相,也有三、五、六甚至更多相。相數和轉子齒數越多,步矩角就越小,在同樣的脈沖頻率下,轉速越低。
2 電機控制模塊結構設計
2.1 概述
步進電機控制主要由電機控制器和電機驅動器兩部分組成,如圖1所示。其中,電機控制器用于控制產生脈沖,電機驅動器用于控制輸出信號的功率放大。本文主要設計電機控制器。從圖1可知,在電機控制器中含Avalon總線接口。在整個NiosII系統中電機控制器作為一個從設備使用。
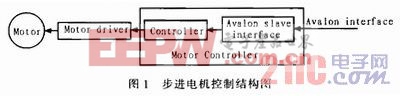
電機控制系統的工作過程是:當控制電機的命令信號經網絡發出,傳給NiosII后,NiosII通過Avalon總線將信號傳給電機控制器,將這個信號作為電機控制器中controller的輸入,然后電機控制器會自動的輸出4相控制步進電機的脈沖信號,這些信號再經過電機的驅動器的功率放大后,就可以直接驅動電機運轉。可以看出其中的controller是整個電機控制模塊的核心。這里的contorller模塊又由3部分組成:脈沖
發生控制器、脈沖發生器、脈沖分相器。脈沖發生控制器主要是為脈沖發生器提供基準脈沖和和標記脈沖個數的寄存器值。然后通過脈沖分相器的作用來控制電機的脈沖信號CP。
2.2 脈沖發生器方案的提出
根據整個系統的設計要求,電機控制器需具有基準時鐘65 536 Hz;輸出脈沖的個數設定范圍1~16 777 215;輸出脈沖的速率設定范圍1-65 535 pps。根據上面的要求,所以需要用一個16位的計數器來實現不同脈沖的信號的輸出,而不同頻率的輸出脈沖之間不能重疊。
有了16種不同的頻率而且互不重疊的基脈沖后,就可以提取16種頻率的脈沖作為疊加脈沖,從而得到0~65 535范圍內的連續可調的脈沖頻率。









評論