振動加速度檢測中傳感器連接狀態的自動識別

2 加速度特征參數的降維與連接狀態的分類識別
2.1 降維
第1節定義的8個特征參數肯定有一定相關性,可通過特征變換來進一步降維,以提高分類識別的效率和推廣性。本文采用基于可分性判據的方法來進行特征變換降維,具體方法如下:
(1)對獲得的四類連接狀態的8維用于學習的特征樣本,求樣本類內離散度矩陣Si、總類內離散度矩陣Sw、樣本類間離散度矩陣Sb。
式中:Xi為第i類的樣本子集;mi為第i類的樣本子集的均值向量;Si為第i類樣本的類內離散度矩陣;Pi為第i類樣本個數占總樣本個數的比例;Sw為總類內離散度矩陣;D為類別數,這里為4;m為總均值向量;Sb為類間離散度矩陣。
(2)求白化變換矩陣B及白化變換后樣本Y。基于Sw的特征值分解,確定消除原分量相關性的K-L變換矩陣U=(u1,u2,…,uD)和歸一化矩陣(Λ是Sw的本征值對角矩陣),則有:

(3)求白化變換后樣本的類問離散度矩陣。
(4)基于的特征值分解,確定K-L變換的本征向量U’和本征值Λ’,取d個最大本征值對應的本征向量為W,即W=[u1,u2,…,ud],后文取d=3。
(5)求特征變換降維后的最終樣本Y1。令Y1=W’Y則得到降維后的樣本。
2.2 分類識別
基于降維后的學習樣本,可以設計分類器,以對傳感器四種連接狀態進行分類識別。本文采用簡單有效而被廣泛采用的近鄰法(Nearest Neighbor Classification)來進行分類。即將降維后的學習樣本作為標準樣本,將每次新獲得的8維原始樣本通過預先確定的降維矩陣B和W降維為待檢樣本;然后,在標準樣本中找出與待檢樣本距離最近的樣本,將其類別確定為待檢樣本的類別。
3 實驗與結果
實驗是用一ICP加速度傳感器檢測工控機開機時上表面的振動,采集卡采用的是NI公司的4474卡,見圖1。實驗中模擬的加速度傳感器的四種連接狀態的具體形式是:
(1)傳感器吸在工控機上表面并與4474正常連接;
(2)傳感器松放在工控機上表面并與4474正常連接;
(3)傳感器端與導線的接頭斷開;
(4)4474端與導線的接頭斷開。每種狀態下共采集50組數據,采樣率均為10 kHz,采樣長度為100 000個點。
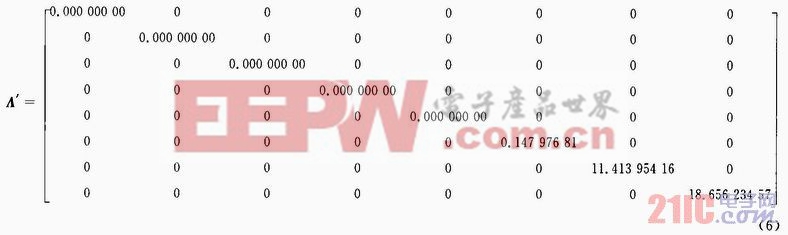
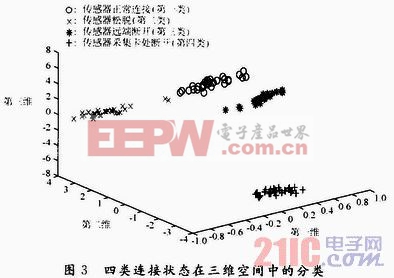
用四種狀態下的前30組數據進行學習。按第1節的方法計算這些數據的原始特征,形成8維的原始特征向量。按第2節的方法分別求出白化變換矩陣B、本征向量U’和本征值Λ’;從式(6)中的最后三個特征值很大可知,降維后的維數應取d=3。降維后的最終學習樣本集Y1(3×120矩陣)見圖3。由圖3可知,四類連接狀態的學習樣本在降維之后能完全分開。
用四種狀態下的后20組數據進行分類測試。首先計算每組數據的8個原始特征,基于學習階段確定的降維矩陣對每個樣本進行降維,這里降為3維;然后,與標準樣本——學習樣本進行一一比對。結果顯示,方法對四種狀態下的每個測試樣本都能正確分類識別,測試正確率為100%。
4 結論
本文定義了表征振動加速度傳感器連接狀態的8個特征,并結合基于可分性判據的特征降維和近鄰法分類,形成了識別振動加速度傳感器四種連接狀態(正常連接、松脫、遠端導線斷開、近端導線斷開)的一種方法或者說途徑。實驗顯示所提方法切實有效。相信該方法在結構健康監測、機器狀態監測等中大有可為,通過自動識別振動加速度傳感器的連接狀態,可避免系統調試及使用過程中出現的異常連接數據進入數據庫,造成數據污染、增加數據庫負擔;同時,該方法也可為傳感器的檢修提供參考。



評論