基于藍(lán)牙和DSP的家用醫(yī)療保健智能機(jī)器人設(shè)計(jì)

⑴系統(tǒng)通過(guò)驅(qū)動(dòng)電機(jī)和轉(zhuǎn)向電機(jī)控制機(jī)器人的運(yùn)動(dòng),轉(zhuǎn)向電機(jī)利用數(shù)字羅盤的信息作為反饋量進(jìn)行PID控制。
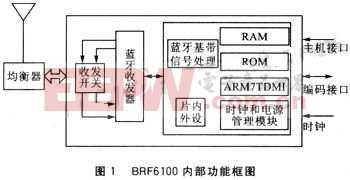
⑵采用愛(ài)立信(Ericsson)公司的ROK101007型電路作為藍(lán)牙無(wú)線通信模塊,實(shí)現(xiàn)智能機(jī)器人與上位機(jī)PC的通信和與其他基于藍(lán)牙模塊的醫(yī)療保健儀器的通信。
⑶支持GPRS的GSM無(wú)線通信模塊支持?jǐn)?shù)據(jù)、語(yǔ)音、短信息和傳真服務(wù),采用手機(jī)通信方式與遠(yuǎn)端醫(yī)療監(jiān)控中心通信。
⑷由于TMS320C54x只有1個(gè)串行口,而藍(lán)牙模塊、GSM無(wú)線模塊、數(shù)字羅盤和視覺(jué)聽(tīng)覺(jué)等感覺(jué)功能傳感器模塊都是采用RS-232異步串行通信,所以必須設(shè)計(jì)1個(gè)多選一串口通信模塊進(jìn)行轉(zhuǎn)換處理。當(dāng)TMS320C54x需要藍(lán)牙無(wú)線通信模塊的數(shù)據(jù)時(shí)通過(guò)電路選通;當(dāng)TMS320C54x需要某個(gè)傳感器模塊的數(shù)據(jù)時(shí),關(guān)斷上次無(wú)線通信模塊的選通,同時(shí)選通該次傳感器模塊。這樣,各個(gè)模塊就完成了與TMS320C54x的串口通信。
3主要醫(yī)療保健功能的實(shí)現(xiàn)
智能機(jī)器人對(duì)于數(shù)字化家庭的醫(yī)療保健可以提供如下的服務(wù):
⑴醫(yī)療監(jiān)護(hù)
通過(guò)集成有藍(lán)牙模塊的醫(yī)療傳感器對(duì)家庭成員的主要生理參數(shù)如心電、血壓、體溫、呼吸和血氧飽和度等進(jìn)行實(shí)時(shí)檢測(cè),通過(guò)機(jī)器人的處理系統(tǒng)提供本地結(jié)果。
⑵遠(yuǎn)程診斷和會(huì)診
通過(guò)機(jī)器人的視覺(jué)和聽(tīng)覺(jué)等感覺(jué)功能,將采集的視頻、音頻等數(shù)據(jù)結(jié)合各項(xiàng)生理參數(shù)數(shù)據(jù)傳給遠(yuǎn)程醫(yī)療中心,由醫(yī)療中心的專家進(jìn)行遠(yuǎn)程監(jiān)控,結(jié)合醫(yī)療專家系統(tǒng)對(duì)家庭成員的健康狀況進(jìn)行會(huì)診,即提供望(視頻)、聞、問(wèn)(音頻)、切(各項(xiàng)生理參數(shù))的服務(wù)。
3.1 機(jī)器人視覺(jué)與視頻信號(hào)的傳輸
機(jī)器人采集的視頻信號(hào)有2種作用:提供機(jī)器人視覺(jué);將采集到的家庭成員的靜態(tài)圖像和動(dòng)態(tài)畫面?zhèn)鹘o遠(yuǎn)程醫(yī)療中心。
機(jī)器人視覺(jué)的作用是從3維環(huán)境圖像中獲得所需的信息并構(gòu)造出環(huán)境對(duì)象的明確而有意義的描述。視覺(jué)包括3個(gè)過(guò)程:
⑴圖像獲取。通過(guò)視覺(jué)傳感器(立體影像的CCDCAMERA)將3維環(huán)境圖像轉(zhuǎn)換為電信號(hào)。
⑵圖像處理。圖像到圖像的變換,如特征提取。
⑶圖像理解。在處理的基礎(chǔ)上給出環(huán)境描述。
通過(guò)視頻信號(hào)的傳輸,遠(yuǎn)程醫(yī)療中心的醫(yī)生可以實(shí)時(shí)了解家庭成員的身體狀況和精神狀態(tài)。智能機(jī)器人根據(jù)醫(yī)生的需要捕捉適合醫(yī)療保健和診斷需求的圖像,有選擇地傳輸高分辨率和低分辨率的圖像。在醫(yī)療保健的過(guò)程中,對(duì)于圖像傳送有2種不同條件的需求:
⑴醫(yī)生觀察家庭成員的皮膚、嘴唇、舌面、指甲和面部表情的顏色時(shí),需要傳送靜態(tài)高清晰度彩色圖像;采用的方法是間隔一段時(shí)間(例如5分鐘)傳送1幅高清晰度靜態(tài)圖像。
⑵醫(yī)生借助動(dòng)態(tài)畫面查看家庭成員的身體移動(dòng)能力時(shí),可以傳送分辨率較低和尺寸較小的圖像,采用的方法是進(jìn)行合理的壓縮和恢復(fù)以保證實(shí)時(shí)性。



評(píng)論