探測機器人煤礦井下地圖創建

井下水面的高程相對周圍環境較小,可以明顯的將水面和周圍環境分類。
為了更為精確地檢測到井下水體,本文采用了多傳感器圖像融合技術,將不同傳感器(熱像儀,立體視覺)獲得同一景物不同特征的圖像相融合,克服了單一傳感器獲取的圖像在幾何、光譜、分辨率等方面存在的局限性和差異性,提高了檢測井下環境中水體的精度。
3.4.3泥濘區域的檢測
在自主導航的機器人活動的范圍內有各種各樣的地形(例如,平整的路面,雜物,泥濘的路面,水體等等),泥濘的路面檢測在機器人自主導航中是一個相對較新的領域,檢測算法還不夠成熟。但是在農業中,依靠估計土壤的水分含量(SMC)去檢測的技術已經發展幾十年了。土壤水分含量已經可以通過直接與土壤接觸的設備或者遙感傳感器測量。[[vii]][[viii]]測量SMC的遙感傳感器設備可以安裝在衛星上,可以安裝在無人機上,也可以安裝在車輛上。但是安裝在衛星和無人機上不適合移動機器人,因為從高空中遙感的土壤水分含量信息精度對地面自主導航機器人來說不夠高;而直接安裝在移動機器人平臺上時傳感器天線會很大,而且直接指向地面,這就要求移動機器人要已經活動在泥濘的區域才能檢測到,給機器人帶來潛在的危險。
泥濘路面的檢測對在井下工作的自主導航機器人也是一個具有十分重要挑戰。井下移動機器人如果在執行任務的時候陷入泥濘的區域,不但需要執行的任務不能順利的完成而且需要去對其救援。由于井下環境有其自身的特點:沒有陽光,沒有植物,沒有天氣因素的影響(溫度變化不明顯,無風,無冰雪等),地質構成與地表不同等等,采用通常的檢測方法不能滿足井下泥濘地形的檢測。
本文中采用了多光譜傳感器和短波紅外傳感器相融合的方式檢測井下環境中泥濘的環境。
在遙感領域內,當采用近紅外光譜和紅色反射空間繪制光譜數據的時候,裸土的多光譜數據會落在一條線上面(簡稱為土壤線)。裸土在土壤線上的位置由土壤的水分含量決定。濕的土壤在土壤線的一端,干的土壤在土壤線的另一端。為了測量土壤的水分含量,采用了鄧肯科技的MS2100多光普傳感器,其光譜掃描范圍為400-1000nm。這種傳感器是基于顏色分離棱鏡和三個成像通道,通過一個共同的孔徑可以獲得四種光譜帶(紅色,綠色,藍色,近紅外),如圖9所示。
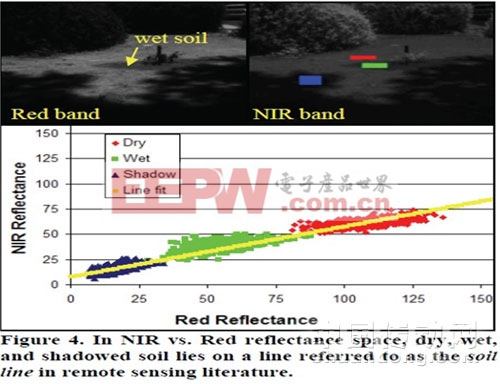
圖9紅色反射空間
通過安裝固定在機器人上的多光譜傳感器,采集到了2組實驗數據。一組數據為裸土和地面雜物;另一組為一條較長的路面。在這兩個測試地面上灑上一定的水,使地面變成泥濘的狀態。在圖10中顯示的是在第一種地形中的紅色和近紅外光譜。圖中也表示了紅光和近紅外光的反射率在像素表中的比率。紅色的小區域代表干燥的土壤,綠色的小區域代表泥濘的地方,而藍色的區域代表處于陰影中的干燥土壤。黃線是由最小二乘法得到的線條。從上面的實驗數據可知,土壤線現象能夠基于地面上的傳感器獲得,在對地面干燥與泥濘分類上有一定的效果。
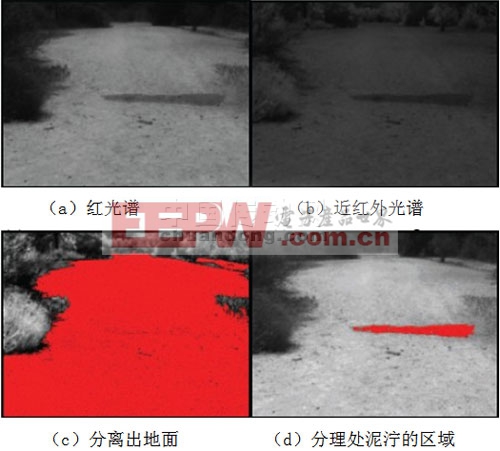
圖10紅色和近紅外光譜
在圖10中顯示了使用多光譜帶去分離出泥濘的區域。圖10(a)(b)分別是在紅光譜下和近紅外光譜下對測試環境的采集圖像,通過采集到的圖像很容易對雜物,路面和地面中的泥濘區域分類。分類結果如圖10(c)(d)所示。
為了對井下泥濘路面的檢測結果更加準確,使機器人在路徑規劃中選擇最優的路徑,更好的完成人們給機器人下達的任務,本文中又采用另一種方法與多光譜分離方法相融合。
水對于短波紅外具有很強的吸收能力,因此泥濘的土壤也具有這樣的屬性。Lobell和Asner在2002年就已經用光譜儀和一個校準過的光源在實驗室中測量了四種含水量等級不同的土壤對短波輻射(400-2500nm)的反射能力。他們的報告中說,當用可見光反射,土壤水分含量在20%時就達到飽和,而用短波紅外在土壤水分含量50%時才達到飽和。他們得出的結論是短波紅外比近紅外更適測量土壤的水分含量。研究結果表明了隨著土壤水分含量的增加,在短波紅外帶上土壤的反射系數的拐點是在1450nm附近。這也證明了短波紅外適合檢測泥濘的路面。
在井下移動機器人上安裝了一個SU320M-1.7RT短波紅外傳感器也來檢測泥濘的井下路面。
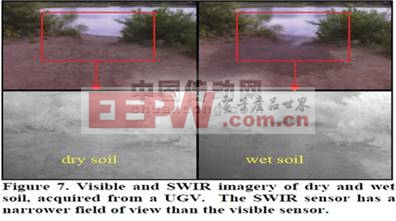
圖11短波紅外傳感器和通用的攝像頭采集到的圖像對比
圖11顯示的是用短波紅外傳感器和通用的攝像頭采集到的圖像對比實驗。在圖11(下)中可以明顯的分辨出路面的干濕程度,用聚類的方法就可以將泥濘的區域分離出來。
通過以上兩種傳感器(多光譜傳感器和短波紅外傳感器)的相互融合,將大大提高對井下環境中泥濘路面的檢測精度,為井下移動機器人任務的順利完成又增加了一層安全保障。
4路徑規劃
DEEC是一臺具有輔助臂的履帶式機器人,它的主要特點是對非平整路面環境的適應能力較強,因此對它的運動控制不同于其他工作于室內結構環境或室外具有平坦路面環境的移動機器人。對于工作于平整路面的移動機器人來說,其路徑規劃的主要目標是從地圖中沒有被障礙物占據的自由空間集合中搜索可達規劃目標點的最優路徑。例如在傳統的柵格地圖中,只需要判斷柵格是否被障礙物占用,如果被占用則采取壁障的策略,假若存在無法避開的障礙物則會導致路徑規劃的失敗。而對于DEEC來說,除了考慮到其自身安全性因素而盡量選取無障礙物通道之外,還可以選擇通過對障礙物的翻越或攀爬在更大的空間內實現路徑的規劃任務,因此DEEC的路徑規劃需要一個具有高程信息的地圖來表達路面環境信息。
5結束語
本文從煤礦井下地圖創建的需求出發,采用雙目視覺方法創建井下2.5維柵格地圖,并對探測機器人路徑進行了規劃。 三維掃描儀相關文章:三維掃描儀原理 熱成像儀相關文章:熱成像儀原理


評論