探測機(jī)器人煤礦井下地圖創(chuàng)建

3.3井下地形特征感知與描述
綜合查閱了關(guān)于非平整路面立體視覺重建的相關(guān)文獻(xiàn),多名研究人員提到關(guān)于立體視覺匹配的不確定性對高程地圖創(chuàng)建的影響,這些不確定性主要來自標(biāo)定誤差,匹配誤差與量化誤差,以及柵格地圖造成的信息損失帶來的誤差。特別的,在匹配誤差和標(biāo)定誤差未知的情況下,重建誤差與場景離攝像機(jī)的距離有很大關(guān)系,文獻(xiàn)【161.Miura,J.,YNegishi,andYShirai.MobileRobotMapGenerationbyIntegratingOmni-directionalStereoandLaserRangeFinder.in1ROS,PP.250—255,2002.】指出,重建的高程誤差隨著離傳感器系統(tǒng)的距離成遞增趨勢。
經(jīng)過研究與分析,劉提出盡管運(yùn)動在非平整路面的移動機(jī)器人會由于顛簸會引起觀測當(dāng)中的絕對高程不一致,但在一定范圍內(nèi)的相對高程保持不變,且相對不確定度更小。重建后地形具有的這種性質(zhì)稱為地形的相對不變形,而基于高程地形某鄰域內(nèi)相對高程提取的環(huán)境特征稱為地形的相對不變特征。也就是說,這類地形特征不隨著車體顛簸而改變。雖然在車體顛簸過程中,感知到的同一地形的絕對高程時(shí)時(shí)在變,但一定范圍內(nèi)的相對高程落差保持不變,地形具有這種相對不變性對于穩(wěn)定地確定不可通行區(qū)域具有重要意義。
3.3.1地形起伏度的檢測
地形的起伏度是反映指定區(qū)域內(nèi)某點(diǎn)鄰域內(nèi)的高程偏離該鄰域平均高程的幅度,起伏度的計(jì)算可以通過計(jì)算該鄰域內(nèi)方差的值來描述。以(xi,yi)為中心,△d為半徑的鄰域Φi,j內(nèi),高程方差可以由下列公式表達(dá):
首先計(jì)算指定點(diǎn)鄰域內(nèi)的高程均值,即:
3.3.2提取地形坡度
同一地形的起伏度具有相地面上某點(diǎn)的坡度表示地表面在該點(diǎn)傾斜程度的一個(gè)量,既有大小又有方向,是矢量。坡度矢量從數(shù)學(xué)上講,其模等于地表曲面函數(shù)在該點(diǎn)的切平面與水平面夾角的正切,其方向等于在該切平面上沿最大傾斜方向的某一矢量在水平面上的投影方向,即坡向。可證明:任一斜面的坡度等于它在該斜面上兩個(gè)互相垂直方向上的坡度分量的矢量和。在高程圖上,坡度反映了地形高程值在某個(gè)方向的變化率。GIS中,坡度的計(jì)算方法可歸納為五種:四塊法、空間矢量分析法、擬合平面法、擬合曲面法、直接解法。一般認(rèn)為,擬合曲面法是求解坡度較好的方法。位置(i,j)處的坡度數(shù)值計(jì)算方法采用曲面擬合的數(shù)值解法,一般采用二次曲面。
3.4井下重要地形目標(biāo)分類與描述
3.4.1階梯的識別
在井下的各種環(huán)境中也存在著階梯形式的地形——臺階,階梯地形的檢測也是非常重要的,在井下的通道內(nèi),自主導(dǎo)航機(jī)器人如果遇到階梯地形時(shí),由于階梯數(shù)太多而將其識別為不可翻越的障礙時(shí),可能會錯(cuò)失一個(gè)較好的路徑,嚴(yán)重時(shí)(當(dāng)只能通過臺階繼續(xù)前進(jìn)時(shí))會導(dǎo)致任務(wù)失敗,機(jī)器人停滯不前。
類似臺階的這類地形最為顯著的特征是具有一組相互平行的直線邊緣,因此最為直接的檢測方法就是邊緣檢測(提取出圖像中的直線特征)。由于井下環(huán)境與地面環(huán)境的不同,對臺階等類似地形的檢測也采用多傳感器融合的技術(shù)(立體視覺傳感器和熱外成像儀傳感器)。
由于視覺傳感器精度和范圍的限制,在機(jī)器人探索過程中,直接對遠(yuǎn)距離景物進(jìn)行直線特征的提取精確度不高,對臺階等檢測效果不明顯,但是可以預(yù)先進(jìn)行對景物的紋理檢測。本文采用了Gabor濾波器作為檢測算法來檢測圖像中是否存在臺階等類似景物的疑似物,并確定其在圖像中的位置。
Gabor濾波器的設(shè)計(jì)需要確定其頻率參數(shù)和方向角。由于階梯型景物是一種具有平行直線的特殊地形和Gabor濾波器的自身性質(zhì)可知,在存在階梯地形的區(qū)域,垂直方向上(90°)Gabor濾波器的產(chǎn)生的響應(yīng)最強(qiáng),相反在水平方向上(0°)濾波器的產(chǎn)生的響應(yīng)最弱。根據(jù)這一特性,選用一系列不同的頻率對圖像(來自立體視覺的數(shù)據(jù)圖像)在水平和垂直方向?yàn)V波,得到Gabor濾波器的最佳頻率參數(shù)(使在水平方向上響應(yīng)最弱,在垂直方向上響應(yīng)最強(qiáng)),如圖4所示。
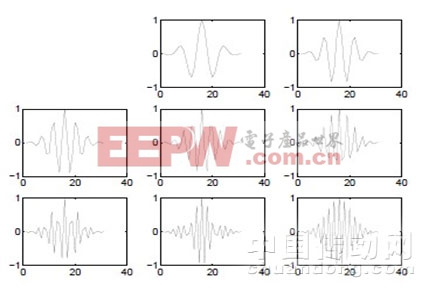
圖4(在8~36Hz不同頻率的響應(yīng),步長為4)
以確定頻率參數(shù)的Gabor濾波器就可以對遠(yuǎn)距離景物實(shí)施紋理檢測。但是由于在井下環(huán)境中,可能存在于階梯類似的紋理(例如,采礦時(shí)留下的規(guī)則痕跡等),會對階梯的檢測產(chǎn)生干擾。
當(dāng)機(jī)器人距離紋理檢測到的疑似階梯景物較近時(shí),可以對其實(shí)施邊緣檢測,進(jìn)一步確定是否是階梯。由于井下惡劣的環(huán)境,機(jī)器人照明系統(tǒng)等因素,往往得到的邊緣是模糊的,間斷的,有一簇彼此相互連接的點(diǎn)集組成。本文采用了Canny邊緣檢測方法,如圖5所示。其有三大優(yōu)點(diǎn):對弱邊緣也有較強(qiáng)的響應(yīng),能夠保證良好的定位和確保每個(gè)邊緣只檢測一次。基于以上準(zhǔn)則的canny邊緣檢測算法如下:
1)圖像使用帶有指定標(biāo)準(zhǔn)差σ的高斯濾波器平滑,以減少噪聲;
4)最后,將連接的弱邊緣像素集成到強(qiáng)像素,實(shí)現(xiàn)邊緣連接。
在Canny算法的實(shí)現(xiàn)上同樣面對參數(shù)選擇的問題,這里要指定低閾值Tl、
高閾值T2以及高斯濾波器的標(biāo)準(zhǔn)差σ。其中,σ是一個(gè)尺度參數(shù),指出在多大的距離內(nèi)兩條平行邊緣將重合成一條邊緣。

(a)原始圖像(b)Canny邊緣檢測
圖5Canny邊緣檢測
在邊緣檢測的基礎(chǔ)上采用Hough變換,實(shí)施邊緣的提取,對邊緣連接。通過Canny邊緣檢測和Hough變換邊緣提取,進(jìn)一步提高了對階梯的檢測精度。如圖6所示。 三維掃描儀相關(guān)文章:三維掃描儀原理 熱成像儀相關(guān)文章:熱成像儀原理


評論