汽車ECU通訊新平臺(tái)--FlexRay(V2.1)協(xié)議規(guī)范


只含有單個(gè)的數(shù)據(jù)域,即一個(gè)24位的CRC。FlexRay的CRC計(jì)算是遵循一定的運(yùn)算法則。包括幀頭CRC計(jì)算和數(shù)據(jù)幀CRC計(jì)算。
3.媒體接入控制(Media Access Control)
在媒體接入控制中,一個(gè)重要的概念就是通訊周期(communicationcycle)。在一個(gè)通訊周期內(nèi),FlexRay提供兩種媒體接入時(shí)序的選擇:一種是靜態(tài)的分時(shí)多址接入時(shí)序(TDMA);一種是動(dòng)態(tài)的基于最小時(shí)間片(mini-slotting)時(shí)序。
在1個(gè)通訊周期內(nèi),有4個(gè)時(shí)間等級(jí)(timing hierarchy),從最低層到最高層分別是:最小時(shí)間節(jié)拍層(microtick)、最大時(shí)間節(jié)拍層(macrotick)、仲裁網(wǎng)格層(arbitrationgrid)和通訊周期層。如圖15所示。

僅次于最高層就是仲裁網(wǎng)格層,仲裁網(wǎng)格層形成FlexRay的媒體接入仲裁的核心,它解決的是采用何種方式接入媒體。在動(dòng)態(tài)部分,仲裁網(wǎng)格由若干個(gè)最小時(shí)間片(minislot)組成。
1)靜態(tài)部分
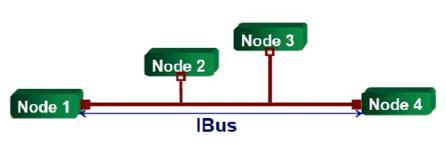
在該時(shí)間段內(nèi)由若干個(gè)靜態(tài)時(shí)間片(staticslot)組成,每個(gè)時(shí)間片的長(zhǎng)度都相等。不同的節(jié)點(diǎn)根據(jù)全局時(shí)間判斷在某一時(shí)刻開(kāi)始接收或發(fā)送某一特定的數(shù)據(jù)幀(flameID)。為了確定這一時(shí)刻每個(gè)節(jié)點(diǎn)的每一個(gè)通道上.都含有一個(gè)時(shí)間片計(jì)數(shù)器,兩個(gè)計(jì)數(shù)器是同步計(jì)數(shù)的。例如有3個(gè)節(jié)點(diǎn),分別為node1、node2和node3。假設(shè)靜態(tài)部分開(kāi)始于00:10,節(jié)點(diǎn)在時(shí)間上的順序?yàn)?-2-3,那么node1將在00:10這一時(shí)刻開(kāi)始在兩個(gè)通道上傳輸flameID1;在00:20時(shí)刻node2開(kāi)始在一個(gè)通道上傳輸flameID2;node3在00:30開(kāi)始傳輸,即使沒(méi)有數(shù)據(jù)幀。如圖16所示。

采用的是基于最小時(shí)間片的時(shí)序,由若干個(gè)最小時(shí)間片組成,最小時(shí)間片的長(zhǎng)度都相等。幀的長(zhǎng)度是可變的,而且與靜態(tài)部分相比,動(dòng)態(tài)部分的兩個(gè)時(shí)間片計(jì)數(shù)器是獨(dú)立計(jì)數(shù)的,在不傳輸數(shù)據(jù)幀時(shí),計(jì)數(shù)器以minislot為周期進(jìn)行加1計(jì)數(shù),在傳輸數(shù)據(jù)幀時(shí)計(jì)數(shù)器不工作。兩個(gè)通訊通道不必同步。一個(gè)動(dòng)態(tài)時(shí)間片(Dynamicslot)包含一個(gè)或多個(gè)minislot。如圖17所示。
4.時(shí)鐘同步
簇內(nèi)所有的節(jié)點(diǎn)都應(yīng)有相同的“時(shí)間觀”,就好像全國(guó)都遵守一個(gè)標(biāo)準(zhǔn)的全局時(shí)間——北京時(shí)間。但這并不意味著節(jié)點(diǎn)間具有完全嚴(yán)格的同步時(shí)間,只要節(jié)點(diǎn)間的時(shí)間差保持在允許的誤差范圍內(nèi)即可。由上述可知FlexRay的時(shí)間等級(jí)制度:若干個(gè)最小時(shí)鐘節(jié)拍構(gòu)成一個(gè)最大時(shí)鐘節(jié)拍,而若干個(gè)最大時(shí)鐘節(jié)拍又構(gòu)成通訊周期的一個(gè)單元。最小時(shí)鐘節(jié)拍是由通訊控制器(CC)的外部晶振提供,對(duì)于不同的控制器,最小時(shí)鐘節(jié)拍可能會(huì)不相同;在一個(gè)簇內(nèi)所有同步節(jié)點(diǎn)的最大時(shí)鐘節(jié)拍都相等。
時(shí)鐘同步包含兩個(gè)主要過(guò)程:最大時(shí)鐘節(jié)拍產(chǎn)生過(guò)程(MTG)和時(shí)鐘同步過(guò)程(CPS)。如圖18所示。MTG控制時(shí)間片計(jì)數(shù)器初值,并對(duì)其進(jìn)行修正。時(shí)鐘同步過(guò)程(CPS)主要完成一個(gè)通訊周期開(kāi)始的初始化,測(cè)量并存儲(chǔ)時(shí)間偏差值,計(jì)算頻率與相位的修正值。時(shí)間偏差可以分為相位(offset)和頻率(rate)偏差。相位偏差是兩個(gè)時(shí)鐘在某一特定時(shí)間的絕對(duì)差別頻率偏差是相位.偏差隨著時(shí)間推移的變化,它反映了相位偏差在特定時(shí)間的變化。FlexRay同時(shí)對(duì)頻率與相位進(jìn)行修正。節(jié)點(diǎn)計(jì)算數(shù)據(jù)幀到達(dá)的實(shí)際時(shí)刻,并與理論上的預(yù)測(cè)時(shí)刻比較,得到的值就是發(fā)送節(jié)點(diǎn)與接收節(jié)點(diǎn)的時(shí)間偏差,并采取一定的算法進(jìn)行修正,最終使簇內(nèi)的節(jié)點(diǎn)上的時(shí)間實(shí)現(xiàn)“同步”。

喚醒針對(duì)的是電源管理系統(tǒng)。有些節(jié)點(diǎn)在不工作時(shí)處于“節(jié)電”模式(power-savingmode),當(dāng)再次投入工作時(shí)就需要“喚醒”該節(jié)點(diǎn);單個(gè)節(jié)點(diǎn)可喚醒整個(gè)組群;主機(jī)可在通訊信道上傳輸喚醒模式(wakeup-pattern)。節(jié)點(diǎn)通過(guò)收發(fā)器進(jìn)行喚醒:當(dāng)節(jié)點(diǎn)的收發(fā)器接收到喚醒特征符(wakeup-symbol)后,對(duì)主機(jī)處理器和通訊控制器進(jìn)行上電。
只有將節(jié)點(diǎn)喚醒后,才能啟動(dòng)節(jié)點(diǎn)工作。初始化一個(gè)啟動(dòng)過(guò)程稱為“冷啟動(dòng)(coldstart)”,能進(jìn)行冷啟動(dòng)的節(jié)點(diǎn)數(shù)目是有限的。系統(tǒng)的啟動(dòng)由兩個(gè)邏輯步驟組成:①冷啟動(dòng)節(jié)點(diǎn)啟動(dòng);②其他非冷啟動(dòng)節(jié)點(diǎn)通過(guò)接收啟動(dòng)幀,與冷啟動(dòng)節(jié)點(diǎn)整合到一起。
三、FlexRay展望
FlexRay以其確定的網(wǎng)絡(luò)通訊、高速的數(shù)據(jù)傳輸及強(qiáng)大的容錯(cuò)功能,很可能成為將來(lái)汽車上的底盤(pán)系統(tǒng)、動(dòng)力系統(tǒng)及線控系統(tǒng)的ECU通訊新的標(biāo)準(zhǔn),并取代高速TTCAN網(wǎng)絡(luò)。2005年10月,Philips推出了全球第一個(gè)FlexRay系統(tǒng)解決方案,包括一個(gè)收發(fā)器和一個(gè)攜帶嵌入式FlexRay2.1版本通訊控制器且基于ARM的微控制器。2006年1月,飛利浦半導(dǎo)體公司推出了面向主動(dòng)安全系統(tǒng)的FlexRay2.1系統(tǒng)解決方案。該解決方案包括兩個(gè)主要部分:TJA1080收發(fā)器和包含一個(gè)ARM9微控制器并且完整集成FlexRay2.1版本的SJA2510通訊控制器。目前德國(guó)寶馬汽車公司承認(rèn)它將采用FlexRay作為主動(dòng)懸架中用于節(jié)氣閥控制的數(shù)據(jù)高速鏈路,在2006年末或2007年初基本實(shí)現(xiàn)生產(chǎn)。此外,F(xiàn)lexRay的評(píng)估套件也已經(jīng)推出。相信在不久的將來(lái),F(xiàn)lexRay必定成為新一代車載網(wǎng)絡(luò)的“排頭兵”。(end)

dc相關(guān)文章:dc是什么
通信相關(guān)文章:通信原理



評(píng)論