汽車ECU通訊新平臺--FlexRay(V2.1)協議規范

汽車電子化程度與日俱增,應用在車上的ECU模塊數量也隨之增加,從而使線束也增加。汽車電子系統的成本已經超過總成本的20%,并且還將繼續增加。由于汽車生產商對制造成本的嚴格控制,加上對車身質量的控制,減少線束已經成為一個必須要解決的問題。另一方面,以網絡通訊為基礎的線控技術(X-by-wire)將在汽車上普遍應用。因此,車載網絡時代終將來臨。
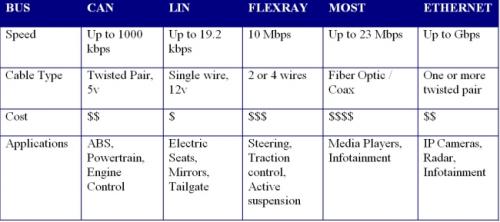
車載網絡種類有很多種,應用較多的有LIN,CAN、FlexRay、TIP/C、SAEJ1850、TFCAN、ASRB、MOST等。美國汽車工程師協會(SAE)根據速率將汽車網絡劃分為A、B、C3類。
A類總線標準包括TTP/A(Time Triggered Protocol/A)和LIN(Local Interconnect Net-work),其傳輸速率較低。①TTP/A協議最初由維也納工業大學制定,為時間觸發類型的網絡協議,主要應用于集成了智能變換器的實時現場總線。②LIN是在1999年由歐洲汽車制造商Audi、BMW、DaimlerChrysler、Volvo、Volkswagen、VCT公司以及Motorola公司組成的LIN協會共同努力下推出的用于汽車分布式電控系統的開放式的低成本串行通訊標準,從2003年開始得到使用。
B類標準主要包括J1850、VAN,低速CAN。①1994年SAE正式將J1850作為B類網絡標準協議。最早,SAEJ1850被用在美國Ford,GM以及Chrysler公司的汽車中。現在,J1850協議作為診斷和數據共享被廣泛應用在汽車產品中。②VAN標準是ISO1994年6月推出的,它基于ISO11519-3,主要為法國汽車公司所用。但目前就動力與傳動系統而言,甚至在法國也集中應用CAN總線。③CAN是德國BOSCH公司從20世紀80年代初為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通訊協議。低速CAN具有許多容錯功能,一般用在車身電子控制中,而高速CAN則大多用在汽車底盤和發動機的電子控制中。
C類總線標準主要包括TTP/C,FlexRay和高速CAN(ISO11898-2)。都用于與汽車安全相關以及實時性要求比較高的地方。如動力系統,其傳輸速率比較高,通常在125kb/s到10Mb/s之間,必須支持實時的周期性的參數傳輸。①TTP/C協議由維也納工業大學研發,基于TDMA(Time Division Multiple Access)分時多址的訪問方式。②FlexRay是BMW、Daimler Chrysler、Motorola和Philips等公司制定的功能強大的網絡通訊協議。基于TDMA的確定性訪問方式,具有容錯功能及確定的通訊消息傳輸時間,同時支持事件觸發與時間觸發通訊,具備高速率通訊能力。③歐洲的汽車制造商基本上采用的都是高速CAN總線標準ISO11898。總線傳輸速率通常在125kb/s~1Mb/s之間。然而,作為一種事件驅動型總線,CAN無法為下一代線控系統提供所需的容錯功能或帶寬,因為X-by-wire系統實時性和可靠性要求都很高,必須采用時間觸發的通訊協議,如TTP/C或F1exRay等。
二、FlexRay協議
FlexRay是由FlexRay共同體(FlexRayConsortium)制定的協議。該共同體為一企業合作組織,成立于2000年。到2005年,FlexRay共同體的7個,核心成員是:BMWGROUP、BOSCH、DaimlerChrysler、GM、Motorola/Freescale、PHILIPS和VWAG。除此之外,它還有超過93個協作和發展成員。從2002年發布的V0.4.3協議規范到2005年的V2.1協議規范,共發布多達7個版本。
F1exRay網絡是一種高傳輸速率(每通道10Mb/s)的時間觸發型網絡。采用分時多址方式對總線進行訪問,具有確定性和容錯功能。非常適合于下一代汽車線控系統或分布式控制系統的通訊要求。
(一)拓撲結構(Topology)
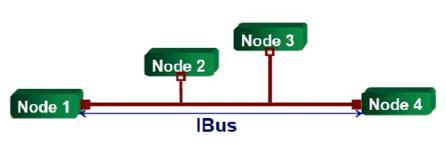
共有3種網絡拓撲結構,即:總線型(Bus)、星型(Star)和混合型(Hybrid)。而每一種類型都有單通道(SingleChannel)和雙通道(DualChannel)之分。在星型結構中,還存在聯級方式。總線型如圖1所示,單、雙通道聯級星型如圖2、圖3所示,單、雙通道混合型結構如圖4、圖5所示。


主要由電源供給系統(Power Supply),總線驅動器(Bus Driver,簡稱BD)、總線監控邏輯(Bus Guardian,簡稱BG)、固化有FlexRay通訊協議的通訊控制器(CommunicationController,簡稱CC)及主機(Host)5個部分組成,如圖6所示。其中BD和BG的個數對應于通道數,而BG是用于避免通道定時錯誤的一個獨立部分,與通訊控制器和微處理器相連。總線監控邏輯必須獨立于其他的通訊控制器。節點的兩個通訊過程如下。

b.接收數據在某一時刻,由總線驅動器訪問總線,將數據位流送到通訊控制器進行解碼,將有效數據部分由通訊控制器送給主機Host。

dc相關文章:dc是什么
通信相關文章:通信原理



評論