基于模糊控制的有源濾波器直流母線電壓控制

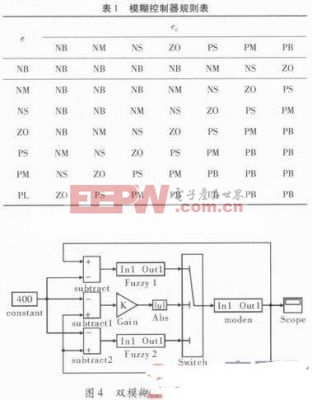
雙模糊控制器仿真模型如圖4所示。
其中控制器的切換由誤差的大小控制,切換原則如下:當(dāng)實際測量值與設(shè)定值之間的偏差>e0時,選擇開關(guān)自動選取模糊控制器1,即進(jìn)行粗調(diào),相反,實際測量值與設(shè)定值之間的偏差e0時,選擇開關(guān)自動選取模糊控制器2控制,即進(jìn)行微調(diào)。
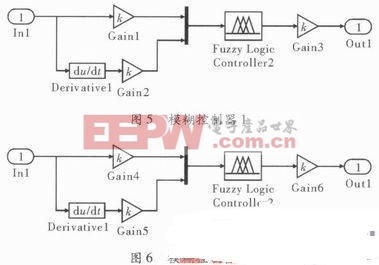
將模糊控制器1輸入e,ec的變化范圍定義為模糊集上的論域e,ec={-3,-2,-1,0,1,2,3}實際的電壓誤差e和ec的范圍是[200,400]可以通過簡單的歸一化計算,得到如上的輸入論域范圍。
同理,通過歸一化計算將模糊控制器2的輸入e,ec的變化范圍定義為模糊集上的論域e,ec={-3,-2,-1,0,1,2,3},實際的電壓誤差e和ec的范圍是[0,200]。
模糊控制器1和模糊控制器2的內(nèi)部封裝如圖5和圖6所示。
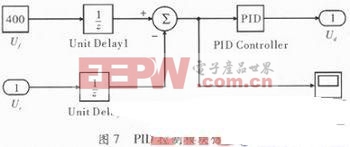
2.2 常規(guī)PID控制方法
目前,在APF中對直流電壓的控制通常采用常規(guī)的PID控制,為比較兩種方法的控制效果,在Matlab/Simulink仿真環(huán)境里,結(jié)合并聯(lián)電壓型有源濾波器模型,建立直流側(cè)電壓的常規(guī)PID控制仿真模塊,如圖7所示,Uf是直流側(cè)總電壓的給定值,Ur是直流側(cè)總電壓的反饋值,兩者之差經(jīng)PID調(diào)節(jié)后得到調(diào)節(jié)信號Ud,它疊加到有功電流ip上。使得有源電力濾波器的補償電流中包含一定的基波有功分量,使電網(wǎng)向有源電力濾波器的直流側(cè)補充能量,將直流側(cè)電壓維持在給定值。
3 仿真分析
本文分別采用雙模糊復(fù)合控制方法與傳統(tǒng)PID控制方法對直流母線側(cè)電壓進(jìn)行控制,在Matlab/Simulink中對APF直流母線電壓進(jìn)行仿真實驗。仿真參數(shù)如下:(1)PID控制器參數(shù)為Kp=1,Ki=0.1,Kd=10。(2)模糊控制器的誤差、誤差的變化的量化因子和輸出的比例因子K1=0.03 K2=0.2,K3=30,K4=0.02,K5=0.3,K6=25。(3)電容器容量為6 800μF,直流母線參考電壓Uf=400 V。
仿真波形如圖8和圖9所示。
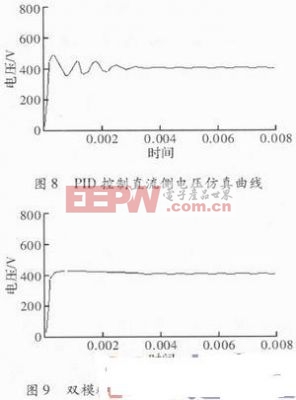
從仿真結(jié)果可以看出,雙模糊控制與常規(guī)的PI控制相比動態(tài)響應(yīng)更快、超調(diào)小、靜態(tài)誤差小,其控制效果明顯好于PID控制方法。
4 結(jié)束語
直流側(cè)電容電壓的控制關(guān)系到整個濾波器的性能。本文對傳統(tǒng)直流側(cè)電壓控制方法存在超調(diào)量和靜差較大的問題進(jìn)行了分析,設(shè)計了雙模糊控制器,該控制方法減少了非線性因數(shù)的影響,使得系統(tǒng)超調(diào)量和靜差也有了較大的改善。同時該控制器具有超調(diào)小、響應(yīng)速度快、靜差小的特點。仿真結(jié)果證明了該控制系統(tǒng)具有良好的控制效果。

pid控制器相關(guān)文章:pid控制器原理






評論