各類運動傳感器工作原理揭秘

前面的圖3給出了隨時間變化的陀螺儀零偏,它代表了長期航向漂移的根本原因。在9軸傳感器融合系統中,加速度計和磁力傳感器建立了一個長期的基準用于校正零偏變化。但磁力傳感器讀數中的噪聲以及磁力傳感器類型對零偏校正的效果有顯著的影響。圖7再次顯示了隨時間改變的零偏變化,但這次畫出了未校正的、用霍爾效應傳感器校正的、用永磁感應傳感器校正的和理想輸出的圖形。值得注意的是,所用的傳感器融合算法對兩種傳感器來說是相同的。
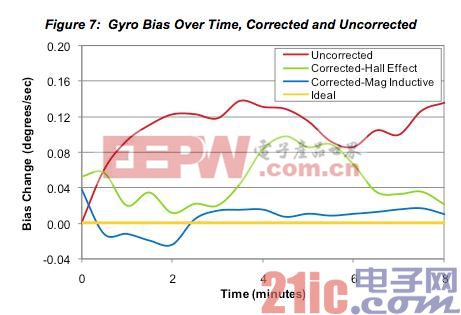
圖7:隨時間改變的陀螺儀零偏,包括校正和未校正的情況。
從圖7可以明顯看出,使用永磁感應傳感器的9軸傳感器融合系統在盡量減小零偏變化方面做得比霍爾效應傳感器要好。這種零偏漂移方面的改進直接得益于永磁感應傳感器低一個數量級的噪聲,因為霍爾效應傳感器相對較高的噪聲將在傳感器融合算法中引入不確定性,進而減弱算法控制零偏的能力。
永磁感應傳感器可以更好地控制零偏漂移的能力將顯著改善隨時間變化的航向性能,如圖8所示。我們在這里可以看到,與未校正系統相比,使用霍爾效應傳感器的傳感器融合系統的長期性能在8分鐘內減少航向誤差的效果高出2倍。但使用永磁感應傳感器的傳感器融合系統與未校正系統相比可以減少航向誤差一個數量級,比基于霍爾效應磁力傳感器的系統好5倍。
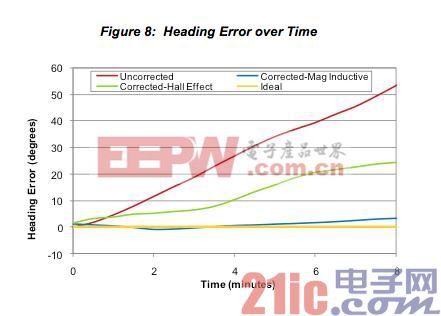
圖8:隨時間改變的航向誤差。
本文小結
隨著使用永磁感應式地磁傳感器代替霍爾效應傳感器的9軸傳感系統的廣泛普及,精確定位移動所需的資源已經就位。首先要理解精度和準確度遠高于目前的“移動接近”系統的運動跟蹤世界可能性,然后才能明白這個世界中的增強現實將更具無限可行性、游戲玩起來更直觀、基于位置的應用也將更具魯棒性。

萬能遙控器相關文章:萬能遙控器代碼
傳感器相關文章:傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器工作原理
風速傳感器相關文章:風速傳感器原理 霍爾傳感器相關文章:霍爾傳感器原理 加速度計相關文章:加速度計原理 矢量控制相關文章:矢量控制原理



評論