各類運動傳感器工作原理揭秘

3軸地磁傳感器
地磁傳感器用于測量地球的磁場,進而推導出航向。歷史上曾用于羅盤的地磁傳感器如今被大批量用于種類廣泛的應用,包括汽車羅盤(在后視鏡中)、手表、雷達探測器、傳動軸和機器人。然而,真正廣泛的采用起始于iPhone 3GS,它是美國首款包含羅盤并得到廣泛普及的智能手機。
● 磁力傳感器的主要問題是它們測量所有磁場,不僅是地球磁場。例如,像電池或含鐵元件等系統元件將干擾傳感器附近的磁場。這些被認為是系統內的固定干擾,可以通過校準進行補償。
● 更大的問題是改變局部磁場會臨時性地干擾航向信息。桌椅上的金屬部件、開過的汽車、附近的其它手機和電腦、窗框、建筑物內的雷達等物件都會干擾讀數。補償這些磁場和其它瞬時地磁異常要求開發出復雜的算法,以便有效地將地球的磁場與其它臨時性“侵入”磁場區分開來。
傳感器融合——將傳感器轉變為運動跟蹤
如前所述,加速度計、陀螺儀和地磁傳感器每個都有各自的優缺點。下表1總結了每種傳感器在運動跟蹤方面的主要優勢和問題。
正如表1總結的那樣,一種傳感器的優勢常常是另一種傳感器的問題,反之亦然。通過智能地“融合”它們的輸出,依靠一個輸出調整或代替另一個的結果,我們可以創建出一個9軸的運動跟蹤系統,其性能將遠好于這些器件的簡單累加。
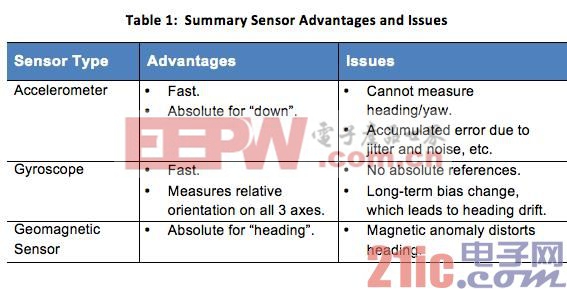
表1:傳感器優勢和問題總結。
今天,9軸“傳感器融合”系統剛剛開始普及。陀螺儀被確立為這些融合系統的主力,因為它具有良好的短期跟蹤精度、快速的響應和更新速率以及對非重力加速度的免疫。陀螺儀的問題——1)沒有絕對基準2)由于零偏漂移而具有嚴重的航向漂移——可以通過聯合運用加速度計和地磁傳感器一起解決。地磁傳感器和加速度計可以給陀螺儀提供航向、傾斜和滾動用的長期絕對基準。
但運動跟蹤的最終精度直接取決于來自各個傳感器的原始輸入有多好。正如我們將要看到的那樣,并不是所有地磁傳感器都提供相同的結果。
在今天的消費電子產品中使用最廣泛的地磁傳感器是霍爾效應傳感器。這種傳感器主導消費市場的原因是體積小、價格低并且節省功耗。但這種傳感器同樣有噪聲,很容易受其它磁場干擾,這些問題如果不校正將限制其向陀螺儀提供正確航向數據的能力。然而,如果能夠接受稍大尺寸的永磁感應式地磁傳感器,就可以在不犧牲成本或功耗的情況下獲得顯著改進的噪聲與分辨率性能。表2顯示了霍爾效應和永磁感應傳感器的規格。注意,永磁感應傳感器可以提供明顯更低的噪聲和更高的分辨率。
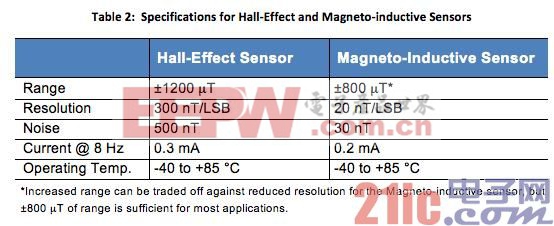
表2:霍爾效應和永磁感應傳感器規格。
下圖顯示了地磁傳感器在磁場強度為2.4mT數量級的固定位置旋轉時輸出的磁場讀數。在圖5中,傳感器旋轉了整整360°,而在圖6中,傳感器從0°旋轉到90°。這兩張圖都繪出了霍爾效應傳感器、永磁感應傳感器和理想傳感器的試驗數據。
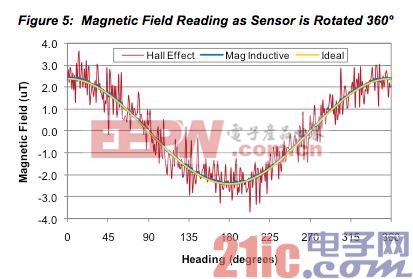
圖5:當傳感器旋轉360°時的磁場讀數。
從圖中可以看出,霍爾效應傳感器的噪聲要比永磁感應傳感器大得多。這與器件參數規格一致,因為霍爾效應傳感器的噪聲指標為500nT,而永磁感應傳感器噪聲指標要低一個數量級,只有30nT。如圖6所示,對霍爾效應傳感器來說,可以在多個方向觀察到2mT的磁場讀數,而2mT的讀數可以代表從5°到60°的任何航向。雖然超采樣可以減少這種不確定性,但這種非常明顯的傳感器噪聲差異確實會導致很大的測量不確定性。這種噪聲差異和相關測量的不確定性將顯著影響9軸傳感器融合算法的性能表現。
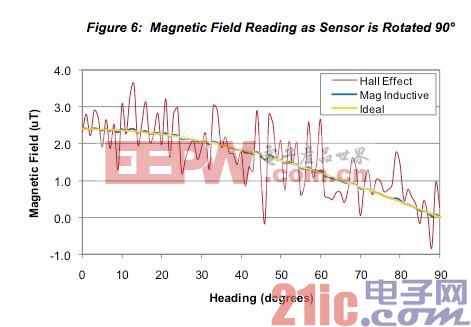
圖6:傳感器旋轉90°時的磁場讀數。

萬能遙控器相關文章:萬能遙控器代碼
傳感器相關文章:傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器工作原理
風速傳感器相關文章:風速傳感器原理 霍爾傳感器相關文章:霍爾傳感器原理 加速度計相關文章:加速度計原理 矢量控制相關文章:矢量控制原理



評論