一種智能交通系統(tǒng)的自適應(yīng)擁塞控制方法

其中,E^,E^C,S分別為e^,e^c和α的模糊量,其論域均為{-6,-5,-4,-3,-2,-1,O,1,2,3,4,5,6}。E^,E^C和S對(duì)應(yīng)的模糊詞集為{NB,NM,NS,ZO,PS,PM,PB}。根據(jù)在校正過程中要遇到的各種可能出現(xiàn)的情況和相應(yīng)的調(diào)整策略得到控制規(guī)則表如表1所示。

根據(jù)表1,用Max-Min方法進(jìn)行Fuzzy推理和逆模糊化,可得到模糊判決表。在系統(tǒng)運(yùn)行時(shí)的t時(shí)刻采樣周期內(nèi),根據(jù)E^,E^C由α調(diào)整規(guī)則模糊判決表可直接查出相應(yīng)的S,從而得出α的相應(yīng)調(diào)整值。
α(t)=kαxS+0.5 (5)
其中,kα為量化因子,使得α∈(0,1)。
4 控制算法實(shí)現(xiàn)步驟
對(duì)于整個(gè)模糊模型參考學(xué)習(xí)控制器來說,在t時(shí)刻采樣周期內(nèi),根據(jù)隊(duì)列長(zhǎng)度誤差和誤差變化率E^,E^C,可由模糊判決表查出相應(yīng)的S,進(jìn)一步得到相應(yīng)的α值,再由E,EC,α根據(jù)式(4)可得到規(guī)則自校正模糊控制器的輸出U,并由量化因子ku計(jì)算得到丟棄概率p。控制算法實(shí)現(xiàn)步驟如下:
1)計(jì)算擁塞控制系統(tǒng)的輸入狀態(tài)。
2)根據(jù)參考模型的輸出與實(shí)際對(duì)象輸出計(jì)算e^,e^c。
3)根據(jù)參考模型誤差和誤差變化率E^,E^C,由式(5)計(jì)算相應(yīng)的α值。
4)計(jì)算規(guī)則自校正模糊控制器的輸出U。
5)由模糊控制的量化因子計(jì)算最終的丟棄概率p。
5 仿真研究
通過仿真試驗(yàn)來評(píng)估模糊參考模型網(wǎng)絡(luò)自適應(yīng)擁塞控制算法,交通流拓?fù)浣Y(jié)構(gòu)采用啞鈴型結(jié)構(gòu),鏈路容量為1 500個(gè)/s,隨機(jī)延時(shí)為[16 s,24 s]之間的平均分布,業(yè)務(wù)源采用了持續(xù)性業(yè)務(wù)流,交通路段的緩存為800個(gè),平均流量長(zhǎng)度為500個(gè)。仿真研究將本文提出的模糊模型參考控制方法與普通模糊控制進(jìn)行比較,研究了在突發(fā)性狀況下2種算法的控制性能和魯棒性能。
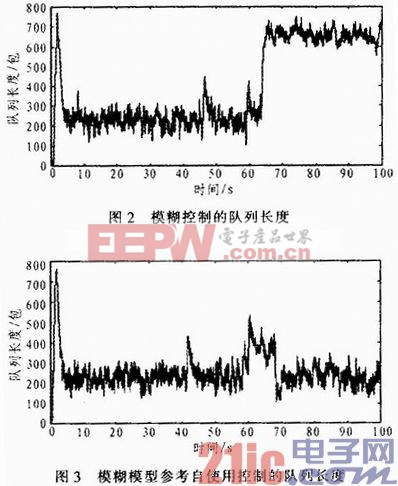
2種控制算法的仿真結(jié)果如圖2、圖3所示,注意到當(dāng)輸入源發(fā)生突發(fā)性增長(zhǎng)時(shí),普通模糊控制策略將使緩沖區(qū)隊(duì)列長(zhǎng)度嚴(yán)重脫離期望隊(duì)列長(zhǎng)度,而使用了模糊參考模型自適應(yīng)控制后,緩沖區(qū)隊(duì)列僅僅經(jīng)過一個(gè)短暫的突發(fā)脈沖就恢復(fù)到平衡點(diǎn)附近。從實(shí)驗(yàn)結(jié)果可以看出,由于普通模糊控制器的推理方式和規(guī)則知識(shí)固定,因此在交通道路車流發(fā)生突發(fā)變化時(shí)難以達(dá)到滿意的控制性能,而本文提出的車流自適應(yīng)擁塞
控制方法能夠跟隨車流量狀況實(shí)時(shí)調(diào)整模糊控制參數(shù),進(jìn)而對(duì)突發(fā)性車流擁塞對(duì)象具備了良好的自適應(yīng)控制性能。
6 結(jié)束語
針對(duì)車流狀態(tài)的突變行為,本文提出了一種基于模糊參考模型機(jī)制的自適應(yīng)擁塞控制算法,以提高在多相位交叉路口的車流量控制的服務(wù)質(zhì)量。該方法采用雙通道信息回路對(duì)車流量緩沖區(qū)隊(duì)列長(zhǎng)度作自適應(yīng)調(diào)整與控制。自適應(yīng)模糊控制計(jì)算過程簡(jiǎn)單迅捷,該算法在自適應(yīng)性能和實(shí)時(shí)性能之間實(shí)現(xiàn)了較好的平衡。性能之間實(shí)現(xiàn)了較好的平衡。







評(píng)論