一種智能交通系統(tǒng)的自適應(yīng)擁塞控制方法
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
隨著經(jīng)濟(jì)的發(fā)展,交通需求和交通量成為城市交通網(wǎng)絡(luò)中急需解決的問(wèn)題,智能交通系統(tǒng)為改善和提高交通發(fā)揮了重要的作用,其中,交通信號(hào)控制是智能交通系統(tǒng)的一個(gè)重要方面,平面交叉口的控制是智能交通流量控制的基礎(chǔ)。交通信號(hào)控制系統(tǒng)具有較強(qiáng)的非線(xiàn)性、模糊性和不確定性,用傳統(tǒng)的控制理論和方法很難對(duì)其進(jìn)行有效的控制,如傳統(tǒng)的交通路口的信號(hào)控制是一個(gè)新的研究方向。1977年希臘的C.P.Pappis和英國(guó)的E.H.Mamdani提出了單交叉口模糊控制法(稱(chēng)Pappis法),分析考慮單交叉路口的理想狀態(tài)下的控制;1992年我國(guó)徐東玲等學(xué)者也提出了基于感應(yīng)控制思想的單路口模糊神經(jīng)網(wǎng)絡(luò)控制方案,效果較好。
目前很多路口都是多相位的,因此多相位平面交叉口的研究很有必要。筆者針對(duì)車(chē)流量擁塞控制問(wèn)題提了一種模糊模型參考學(xué)習(xí)控制策略。交通路口車(chē)流量的高突發(fā)性和時(shí)變特征對(duì)智能交通系統(tǒng)自適應(yīng)性能提了更高的要求。筆者提出的控制策略,主控制通道采用模糊控制方法,綜合考慮多相位平面交叉口當(dāng)前到達(dá)車(chē)輛的排隊(duì)長(zhǎng)度和后繼兩相位車(chē)輛的排隊(duì)長(zhǎng)度,對(duì)相位實(shí)施不同的配時(shí)方案,保證系統(tǒng)的穩(wěn)定性和魯棒性;輔助學(xué)習(xí)通道采用模糊模型參考自適應(yīng)方法實(shí)現(xiàn)主通道控制參數(shù)的自修正和自學(xué)習(xí)過(guò)程,針對(duì)車(chē)流量突發(fā)性狀況自適應(yīng)調(diào)整主控制通道的配時(shí)參數(shù),對(duì)相位實(shí)施不同的配時(shí)方案,提高多相位路口的通行能力,緩解交通壓力。
1 車(chē)流量擁塞控制模型
根據(jù)智能交通系統(tǒng)中多相位路口車(chē)流量主動(dòng)隊(duì)列管理的作用機(jī)制,可以得到擁塞控制的流體動(dòng)力學(xué)模型如下所示:
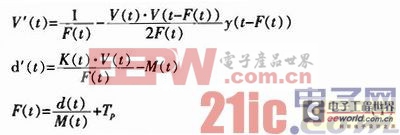
其中,V(t)為車(chē)流量窗口大小;F(t)為車(chē)流傳播時(shí)間RTT;d(t)為車(chē)流緩沖區(qū)隊(duì)列長(zhǎng)度;M(t)為車(chē)流鏈路容量;Ty為傳輸時(shí)間;K(t)為交通路口活動(dòng)相位連接數(shù);y(t)為主動(dòng)丟棄概率。定義(V。d)為流體模型的狀態(tài)變量,y為輸入變量。令V’=0和d’=0時(shí),得到網(wǎng)絡(luò)流體動(dòng)態(tài)系統(tǒng)的平衡點(diǎn)(V0,d0,y0)。進(jìn)一步在平衡點(diǎn)附近線(xiàn)性化,則可得到在近似時(shí)滯二階動(dòng)態(tài)的傳遞函數(shù)為

2 主通道模糊控制系統(tǒng)設(shè)計(jì)
本文模糊模型參考學(xué)習(xí)控制器引入了參考模型的學(xué)習(xí)機(jī)制對(duì)模糊控制的知識(shí)庫(kù)進(jìn)行修正。由于高速網(wǎng)絡(luò)中分組丟棄機(jī)制需要較強(qiáng)的實(shí)時(shí)性,因此本文提出的控制方法采用了模糊反向推理機(jī)制對(duì)主控制器的參數(shù)進(jìn)行修正,以滿(mǎn)足系統(tǒng)的實(shí)時(shí)性要求。擁塞控制系統(tǒng)輸入為平均隊(duì)列長(zhǎng)度與期望隊(duì)列長(zhǎng)度的偏差以及偏差的變化率,系統(tǒng)輸出為所計(jì)算的丟棄概率。主通道模糊控制器是一個(gè)雙輸入單輸出結(jié)構(gòu)的控制器,輸入變量為A,B(隊(duì)列偏差、偏差變化率),輸出變量為C(控制量丟棄概率)。控制規(guī)則表示為
Ri:if A is Ai and B is Bj then C is Ck (3)
其中Ai,Bj,Ck分別表示語(yǔ)言詞集。主通道模糊控制器的輸入為E和EC,輸出為U,設(shè)定E,EC和U的論域均為:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。對(duì)應(yīng)的模糊語(yǔ)言子集為{NB(負(fù)大)、N(負(fù)中)、NS(負(fù)小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)}。通過(guò)比例因子ke和kec將偏差e和ec轉(zhuǎn)換為模糊學(xué)習(xí)控制器的輸入論域E和EC,通過(guò)量化因子ku將控制器的輸出轉(zhuǎn)化為實(shí)際控制量。E=exke和EC=ecxkec其中()為取整運(yùn)算。在模糊模型參考學(xué)習(xí)控制器中,控制規(guī)則可以得到在線(xiàn)實(shí)時(shí)調(diào)整,每個(gè)輸出與輸入可以用一定的對(duì)應(yīng)關(guān)系來(lái)表示:
U=axE+(1-α)xEC>,α∈[0,1] (4)
通過(guò)調(diào)整α,就可以根據(jù)不同交通網(wǎng)絡(luò)狀況、不同時(shí)刻的誤差和誤差變化率來(lái)調(diào)整控制規(guī)則。當(dāng)平均隊(duì)列長(zhǎng)度與期望隊(duì)列長(zhǎng)度之間的偏差較大時(shí),或者當(dāng)網(wǎng)絡(luò)的業(yè)務(wù)量突發(fā)性能較強(qiáng)時(shí),誤差對(duì)輸出的影響應(yīng)超過(guò)誤差變化率的影響,α的值應(yīng)取得較大以獲取較好的穩(wěn)定性。反之,α的值可取得小些以提高系統(tǒng)控制精度。模糊模型參考學(xué)習(xí)控制就是利用參考模型的輸出與實(shí)際輸出的誤差及其變化率實(shí)時(shí)在線(xiàn)地調(diào)整α的值來(lái)達(dá)到調(diào)整控制規(guī)則的目的。為了使模糊模型參考學(xué)習(xí)控制器做到實(shí)時(shí)在線(xiàn)推理,對(duì)模糊模型參考學(xué)習(xí)控制器的推理過(guò)程進(jìn)行了改進(jìn)。
3 輔助通道模糊反向推理設(shè)計(jì)
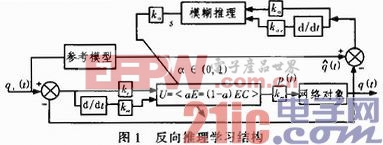
本文仍然采用模糊推理方法來(lái)完成對(duì)α的調(diào)整,以保證修正過(guò)程的簡(jiǎn)單迅捷。α的調(diào)整過(guò)程是基于參考模型與實(shí)際對(duì)象的誤差及其變化率的模糊推理來(lái)實(shí)現(xiàn)的。具體實(shí)現(xiàn)如圖1所示。







評(píng)論