高可靠性末端效應器控制系統設計

1.2.3 控制系統硬件各個模塊的實現方案
1)PWM控制電路實現
本系統的電機調速主要考慮采用PWM(脈寬調制)調速。調壓調速是無刷直流電機目前最常用的一種調速方式,主要是通過改變加在電機電樞繞組兩端的電壓來改變電機的轉速,這種方法通常將電機的電壓由額定電壓向下調節電樞電壓,達到使電機轉速由額定轉速變為向下調速,這種調速方法調節的過程中損耗的能量小,且轉速過程中系統波動比較小,靜態的穩定性較高,響應速度快。是當前無刷直流電機應用最常見的、運行最穩定、最有效的調速方式,它通常有PWM調節方式、旋轉變流機構調節方式以及靜止變流機構調節方式。目前無刷直流電機無級調速系統也大多都采用調壓調速中的PWM調節方式。
PWM調節方式是一種根據能量轉換等效原理,是由將固定不變的系統電壓斬截成占空比可變的PWM波,經過改變占空比來實現電機電樞兩端平均電壓的電壓調節方式,這種調節方式的特點具有體積小、凋速性能好、成本低、控制方便等優點,與此同時,它也比較容易與控制器之間構成閉環控制系統,控制方法也顯得靈活多變。因此,我們采用PWM調壓調節方式。在本系統中PWM脈沖波的產生是直接通過DSP的PWM口得到。
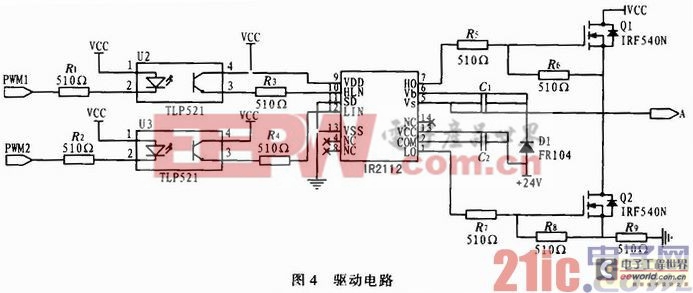
2)驅動電路設計
對于末端效應器系統,驅動電路部分采用專門的集成的驅動模塊結合MOSFET實現。為了避免和DSP之間產生干擾,增強可靠性,采用光電隔離模塊和集成驅動模塊共同構成驅動電路來驅動功率MOSFET管。如圖4所示,由光電隔離模塊和IR2112模塊組成的驅動A相橋臂的連接方式。光耦部分起到隔離和電平轉換的作用。驅動三相全橋電路需要6路PWM信號,而IR2112只能同時輸出2路PWM信號,所以驅動電路共需要3片IR2112芯片。
3)電流檢測和速度檢測電路
電流檢測電路就是將電機的三相電流進行數模轉換器采集,然后反饋到主控制器,與控制芯片內的速度控制器產生的電信號做比較,完成對電機的電流閉環控制。本控制系統中實際的電流比較小,功率也比較小,因此采用了一個旁路電阻來檢測實際電機的相電流的大小,電阻位于三相功率變換全控的電路的橋臂和地線之間。
速度檢測電路是控制系統中最重要的環節。速度檢測電路檢測電機的實際轉速并且將檢測的實際速度信號轉化為電信號直接傳送到控制芯片的引腳,然后在主控制器內完成對轉速的計算并且和電機的預定轉速作比較完成回路系統。
本系統利用控制器的計算處理能力,采用霍爾位置傳感器的信號來計算無刷直流電機的轉速。
2 末端效應器控制器可靠性及長壽命設計
在第一章節中末端效應器的詳細設計中控制器的設計包括任務級執行級控制方案、具體軟硬件實現中元器件選擇及實現方案等都是以高可靠性為中心進行分析和設計的。下面主要從軟硬件的角度考慮故障的處理方法,還有容錯控制策略的設計。
2.1 軟硬件可靠性保證
2.1.1 硬件可靠性保證
解決可靠性問題最主要的方法是執行器故障診斷和處理。常見電機故障有:
1)電機過載、過流。由于系統的電流比較小,故可以采用主回路串聯采樣電阻的方法進行過流檢測。定子電流經過電阻之后轉變成電壓信號,在此串入小電阻,小電阻兩端的電壓經過放大隔離后送入A/D單元,通過主控制器的軟件編程或邏輯實現對電機的過載保護。
2)電機過速。
3)驅動器非正常復位。本系統采用了硬件冗余,設計了急停電路,使系統停止運行。
另外光電編碼器等傳感部件也可能發生故障。在系統運行時可能出現的故障有:
1)數據傳輸錯誤。診斷辦法是采用奇偶校驗法判別,然后用線性外推法給出當前傳感器數據;
2)數據采集錯誤。這種故障可能造成控制力矩的波動,診斷采用野點剔除的辦法加以剔除,然后用線性外推法給出當前傳感器數據。
2.1.2 軟件可靠性保證
1)系統啟動自檢。在啟動系統時,必須檢測元器件是否正常工作。
2)系統故障報警和處理。當有故障發生時,軟件能檢測出該故障,并診斷其故障類型,從而做出必要的處理。
3)事故急停處理。當一旦有事故發生時,系統應該立即關閉,力求將事故對系統的破壞降低到最低程度。
2.2 高可靠性獨立控制系統的合理容錯控制策略設計
空間站遠程遙操作機械臂SSRMS(Space Station Remote Manipulator System)、歐洲遙操作機械臂ERA(European Robotic Arm)、日本實驗艙遙操作機械臂JEMRMS(Japanese Experimental Module Remote ManipulatorSystem)在設計和運行過程中都要求機械臂系統至少能夠容忍兩次故障的發生。這對末端效應器控制系統也提出了一個新的要求。控制系統的容錯設計及故障檢測與診斷是提高航天器的可靠性的有效途徑。
末端效應器控制系統除了提高單一控制系統的高可靠性之外,考慮采用控制系統的容錯也是提高可靠性的一個合理的選擇。同時對于一個精密的運動控制系統來說,系統的容錯性是調試和運行時需要考慮的功能完整性問題。對于控制系統的容錯設計主要考慮以下兩方面的要素:
1)需要結合具體的任務,選擇合適的傳感器、執行器和控制器備份策略:
2)需要考慮與之相配合的故障診斷和診斷方法。
對于傳感器、執行器和控制器備份方案,本系統了采用類似于ERA的關節控制系統,即采用雙繞組永磁同步電機構建相互獨立的2套驅動子系統,但是由于2套驅動系統工作在冷備份模式,容錯能力不高,且沒有充分利用冗余備份的傳感器資源,所以為了提高容錯能力,本系統選擇了雙繞組余度電機工作在熱備份模式。
由于末端效應器機械機構具有模型非線性、摩擦非線性和負載變動的自適應等因素,本系統的故障檢測和故障診斷主要是基于傳感器冗余信息的故障檢測方法,主要通過位置傳感器、力傳感器的信號來推斷系統的狀態,進而進行故障檢測。位置信息的配置主要包括電機數字霍爾傳感器、電機旋轉變壓器等多級容錯備份和故障檢測。力傳感器的故障通過計算電機位置信息和參考力進行比較來判斷。
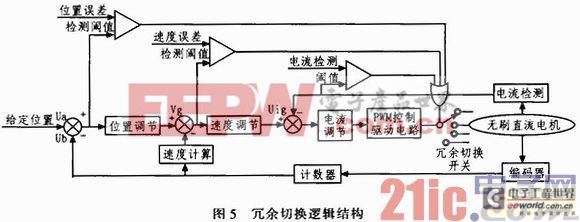
結合實際情況,本控制系統的電機驅動控制部分容錯設計主要采用了雙繞組余度電機工作在熱備份模式。相應的故障檢測方法為基于傳感器冗余信息的故障檢測方法。具體的冗余切換邏輯結構如圖5所示。
3 結論
末端效應器機械機構在空間環境中穩定可靠性的工作,作為其核心的電機控制系統的長期穩定可靠的工作就顯得尤為重要。因此文中首先考慮完成任務的運動規劃問題,然后考慮了控制系統方式及其軟硬件實現的具體要求.來實現高可靠性獨立控制系統的設計。并且在高可靠性獨立控制系統的基礎上,還設計了合理的容錯控制策略。此系統經過實驗,達到了設計要求。

陀螺儀相關文章:陀螺儀原理













評論