6自由度機器人關節間隙誤差分析及仿真

根據圖6的坐標系建立機器人空間運動方程。根據邊線12和邊線34的偏移角度,假定虛擬關節旋轉2度,其狀態在運動過程中不發生變化。進行matlab動態仿真,仿真結果如圖7。
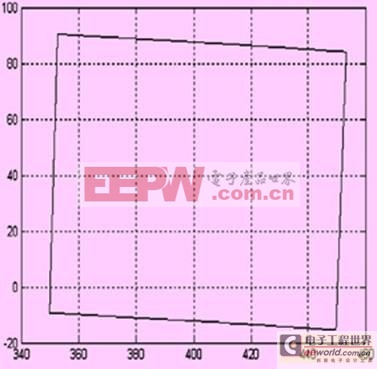
圖7 仿真軌跡圖
由圖7的仿真圖與圖5的實際軌跡圖對比可知,兩者的軌跡走向基本一致;從圖8的z向誤差圖可以得知,機械間隙導致z向有近0.1mm的變化。
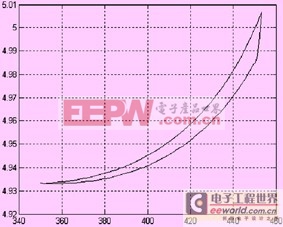
圖8 軌跡z向誤差圖
由仿真分析結果可以斷定,軌跡偏移主要由第2關節的軸承間隙引起。
從直觀角度分析:
● 關節間隙導致機器人手臂有一定范圍的滾翻,翻滾角度不變,隨著手臂的展開偏移誤差不斷增大,導致邊線傾斜。
● z向誤差導致筆尖上下移動,線條軌跡不均勻。
結語
本方法將關節間隙等效為一個旋轉一定角度的虛擬關節,在定性分析的同時,得到關節間隙對機器人精度的量化誤差。
根據建立的誤差方程求解機器人的逆解,部分關節軌跡為復數解。說明通過算法對于該誤差的補償很有限,機器人整體機械結構是決定機器人精度的關鍵因素。
對第2關節的軸承進行調整,軌跡偏移問題得到解決,可以繪制出規則的圖形。










評論