空氣壓縮機防喘振優化控制系統設計

常規PID控制器原理簡單,魯棒性較強、動態和靜態特性優良,特別是對一階對象模型具有最優調節器的結構特點。但常規PID控制器不具有在線參數整定功能,對系統模型的精確性依賴較強,對于非線性、時變且受隨機干擾的控制系統,一般難以獲得較好的控制性能,即使通過一些假設和簡化導出的數學模型,仍有許多參數無法確定。
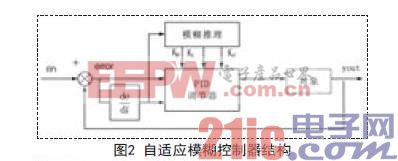
自適應模糊PID控制器以誤差e和誤差變化ec作為輸入,可以滿足不同時刻的e和ec對PID參數自整定的要求。利用模糊控制規則在線對PID參數進行修改,便構成了自適應模糊PID控制器,其結構如圖2所示。
3.控制系統中應注意的問題及現有的技術
3.1防喘振調節系統應注意的問題
(1)在確定防喘振控制線及喘振線后,通常都要建立一條備用線即系統要留有一定的安全裕度,這樣可以更加準確的保證系統的運行,同時又不會降低工作效率。
(2)在選擇調節裝置時要以經濟、使用為原則兼顧先進性,用智能調節器和可編程控制器都可以,現在DCS控制系統以其良好的性能,會逐步取代了PLC控制器,但現有技術還是以可編程控制器PLC為主。
(3)為了確保系統的安全性,要對控制系統進行聯鎖,以避免急速變化時給系統帶來的影響。
隨著自動化領域的不斷發展,防喘振控制系統以逐步向著智能控制方向邁進防喘振效果也會越來越好。
3.2目前已有的技術可實現的功能
(1)溫度補償功能;(2)防喘振閥門的快開慢關功能;(3)喘振檢測功能;(4)自學習喘振控制的確認與復位功能;(5)對防喘振線的趨進報警功能;(6)控制器自動、手動、手自動功能;(7)多段折線代替直線的防喘振線。
在今后的研究中不單單是如何對系統進行控制,同時要考慮在控制的同時能否更好的保證其安全性及經濟性。總之,應根據使用要求和工藝條件、綜合選優,采用最佳防喘振調節方法,設計最合理防喘振調節系統。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
.jpg)


評論