單芯片無(wú)刷直流散熱微電機(jī)驅(qū)動(dòng)電路綜述


2.1.2 三相無(wú)定位傳感器驅(qū)動(dòng)控制芯片
由于定位傳感器型驅(qū)動(dòng)芯片存在缺點(diǎn),故此處采用無(wú)定位傳感器驅(qū)動(dòng)芯片。當(dāng)前無(wú)定位傳感器驅(qū)動(dòng)芯片多采用三相驅(qū)動(dòng)方式,通過(guò)檢測(cè)不通電那一相線圈繞組反向電動(dòng)勢(shì)過(guò)零計(jì)算出電機(jī)驅(qū)動(dòng)電流換相時(shí)機(jī)。在LV8800,BH67172及DRV10863中都采用了上述控制方式。
圖3為上述控制方法工作原理。假設(shè)u,v兩相導(dǎo)通,w相繞組線圈浮空且無(wú)電流。導(dǎo)通u,v兩相反向電動(dòng)勢(shì)大小相等方向相反,二者之和等于零。而浮空相繞組線圈反向電動(dòng)勢(shì)ew正負(fù)變化反映了浮空相過(guò)零,因此可采用上述方法檢測(cè)電機(jī)轉(zhuǎn)子位置,從而確定電機(jī)換相時(shí)機(jī)。
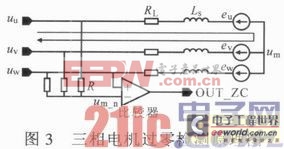
由于三相無(wú)定位傳感器型驅(qū)動(dòng)芯片采用開(kāi)關(guān)模式而非線性放大,同時(shí)無(wú)位置傳感器,因此其軟開(kāi)關(guān)實(shí)現(xiàn)方式與定位傳感器型驅(qū)動(dòng)芯片不同:其根據(jù)反向電動(dòng)勢(shì)過(guò)零信息通過(guò)數(shù)字電路計(jì)算出軟開(kāi)關(guān)換相區(qū)域,且采用PWM模式進(jìn)行控制:當(dāng)電機(jī)轉(zhuǎn)子臨近反向電動(dòng)勢(shì)過(guò)零點(diǎn)時(shí),提前減小將退出驅(qū)動(dòng)相的輸出占空比;當(dāng)電機(jī)轉(zhuǎn)子離開(kāi)過(guò)零點(diǎn)后,逐漸增加開(kāi)始驅(qū)動(dòng)相的驅(qū)動(dòng)占空比。采用上述模式換相控制后,退出驅(qū)動(dòng)相電流逐漸減少,進(jìn)入驅(qū)動(dòng)相則逐漸增加。因此換相點(diǎn)附近電機(jī)換相力矩平穩(wěn),能實(shí)現(xiàn)電機(jī)低噪聲運(yùn)轉(zhuǎn)。
2.2 電源電壓12 V驅(qū)動(dòng)電路控制方案
該類方案主要用于個(gè)人電腦及各種測(cè)試設(shè)備,驅(qū)動(dòng)功率適中,因此功率驅(qū)動(dòng)管多采用內(nèi)部集成方式實(shí)現(xiàn)。由于電源電壓從4.5~18 V變化,若仍采用低壓應(yīng)用時(shí)的線性放大模式,那么在傳感器信號(hào)幅度較低時(shí),換相產(chǎn)生的熱量大,極易損壞驅(qū)動(dòng)系統(tǒng),因此多采用開(kāi)關(guān)型橋式驅(qū)動(dòng)。代表解決方案有LB11961及EUM6861。該類方案的最大特點(diǎn)是電機(jī)轉(zhuǎn)速曲線外部可調(diào):能自由設(shè)定電機(jī)最低轉(zhuǎn)速,同時(shí)還能靈活設(shè)定電機(jī)轉(zhuǎn)速曲線斜率。電機(jī)轉(zhuǎn)速曲線控制示意圖如圖4所示。
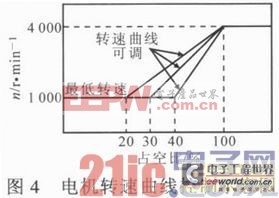
圖5詳細(xì)分析了調(diào)速原理:當(dāng)VTH和RMI任一引腳電壓低于CPWM引腳產(chǎn)生的三角波電壓時(shí),輸出信號(hào)為高電平,此時(shí)集成的功率管驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)。RMI引腳設(shè)定電機(jī)最低轉(zhuǎn)速,該引腳直流電壓與CPWM引腳三角波信號(hào)比較確保輸出有最小驅(qū)動(dòng)占空比,從而保證電機(jī)最低轉(zhuǎn)速。VTH引腳的直流電壓、CPWM三角波及RMI電壓共同控制電機(jī)轉(zhuǎn)速曲線斜率。

霍爾傳感器相關(guān)文章:霍爾傳感器工作原理
霍爾傳感器相關(guān)文章:霍爾傳感器原理




評(píng)論