太陽能自動跟蹤系統的設計

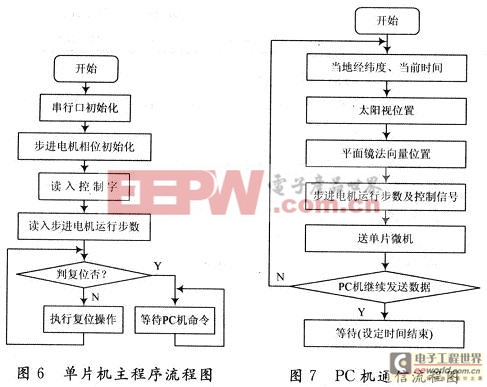
軟件的另一部分為PC機部分,PC機軟件部分主要是負責任意時刻太陽位置的計算并運用軟件計算出當前狀況下俯仰與水平方向步進電機運行的步數,并將數據送給跟蹤系統驅動器。與單片機通信的部分使用VC++中的MSComm控件來編譯串口通訊的應用程序,采用MSComm32.OCX控件。使用控件的屬性進行串口設置,使用控件的事件驅動進行串口響應,使用控件的方法完成串行口接收和發送數據。PC機通信流程圖如圖7所示。
上位機控制系統具有實現復位、水平方位的調整,俯仰方向的調整,太陽位置的跟蹤、手動校準及計算當日數據等功能。其中“設置”按鈕,可進行地方經緯度、波特率、步進電機動作頻率等的設置。上位機可執行程序控制界面如圖8所示,圖9所示的是控制主界面下“設置”按鈕的對話框。
試驗觀察數據分析
由于影響跟蹤精度的因素很多,不僅跟當地緯度、太陽赤緯角、太陽時角的取值有關,還跟步進電機的精度以及跟蹤轉臺的機械結構有關,因而需要對跟蹤軌跡的程序進行校正。校正采用手動操作,通過控制水平俯仰方位步進電機,使兩個軸帶動平面鏡反光裝置轉動,同時不斷觀察平面鏡反射太陽光的影子,當影子中心剛好聚在指定點時為最佳,記錄下從原點到該點兩軸的步進電機各自走過的步數,根據實際運行步數與理論運行步數之差,可計算得到角度之差,就是高度角和方位角的修正值。校正可以選擇任一天中幾個不同時刻進行。系統在實際運行時,觀察到太陽在正午至下午3點期間,高度角方位角變化曲線存在明顯拐點,變化比較顯著,在此期間內系統對太陽位置的跟蹤存在誤差。
表1中列出了2009年1月12日中午至下午三時左右的理論數據,并用系統的手動校準功能,記錄下不同時刻的步進電機實際運行步數。
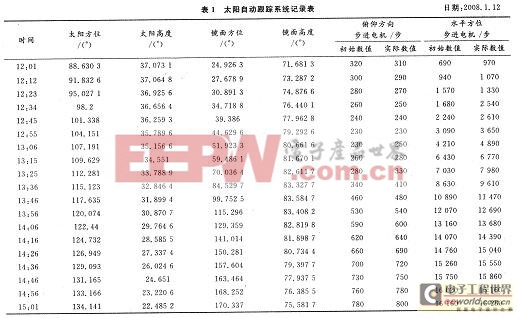
為了更準確地得到太陽實際位置的參數修正值,應在春夏秋冬四季中不同時刻分別觀測記錄數據,將得到的一組高度角和方位角的校正值,擬合其曲線。用校正系數校正理論值存入控制程序,可以提高跟蹤精度。
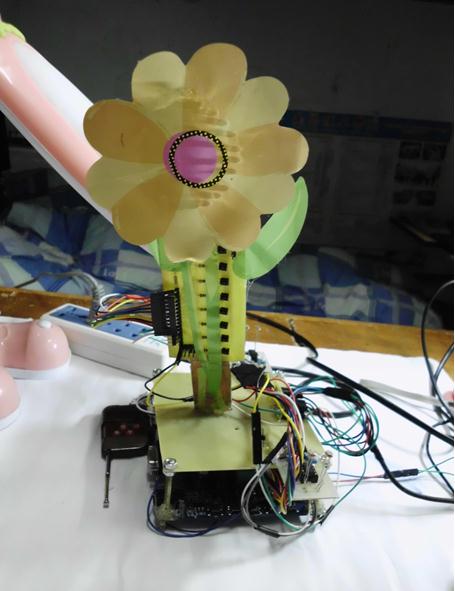
本文介紹的太陽自動跟蹤裝置可以有效地提高太陽能利用率,適用于各種需要跟蹤太陽的裝置。經過試驗、測試和實際使用,各項指標均達到了設計要求。本文設計的太陽自動跟蹤裝置是基于視日運動規律,為使系統具有更高的跟蹤精度,可采用光電傳感器跟蹤校正,構成由視日運動規律跟蹤和傳感器跟蹤的混合跟蹤系統。隨著太陽能自動跟蹤裝置的廣泛應用,它定會有助于提高綠色能源利用






評論